内容介绍
内容介绍
项目需求
作业题目及要求
- 可编程 PWM 发生器
- 使用 RP2040 的 PIO 编程,生成 3 路最高重复频率为 12MHz 的 PWM 信号,每一路的重复频率和占空比都可独立调节;
- 重复频率越高,占空比分辨率降低,占空比的调节精度最高设定为 1/1000;
- 使用按键和拨轮组合调节输出输出频率、占空比,并由按键控制每一路 PWM 信号的输出;
- 能在 LCD 上显示基础信息如当前使用引脚示意、引脚相应的 PWM 参数;
需求分析
- 硬件需求:
- RP2040 开发板:可以选择 Raspberry Pi Pico 等基于 RP2040 芯片的开发板,确保具备足够的 GPIO 引脚用于生成 PWM 信号和控制 LCD 显示屏。
- LCD 显示屏:选择兼容 RP2040 开发板的 LCD 显示屏,常见的选择包括 1602A 型字符型液晶显示器或者 0.96 寸 OLED 显示屏。另外,需要考虑显示屏的驱动芯片和通信接口,确保与 RP2040 开发板兼容。
- 按键和拨轮:选择带有数字编码器(用于拨轮)和按键的模块,例如带旋转编码器和按钮的旋转编码器模块,确保兼容 RP2040 开发板的输入电平和通信协议。
- 电路连接器和线缆:根据实际需求选择合适的连接器和线缆,确保连接可靠且布线整洁。
- 软件需求:
- PIO 编程环境:使用 RP2040 官方提供的 PIO SDK,或者第三方成熟的 PIO 开发环境,用于编写和调试生成 PWM 信号的 PIO 代码。
- 控制程序语言:选择适合的编程语言,如 MicroPython 或 C++,用于编写控制程序。
- 开发工具:选择适合的集成开发环境(IDE)或文本编辑器,如 Thonny 或 Visual Studio Code,用于编写和调试控制程序。
- RP2040 开发板驱动程序:根据具体的开发板型号下载并安装对应的 USB 驱动程序和固件烧录工具,确保 RP2040 开发板能够正常连接和通信。
- LCD 驱动库:选择适合的 LCD 驱动库,如 RPi.GPIO 或 Adafruit CircuitPython 库,用于控制 LCD 显示屏的输出。
- 输入处理库:选择适合的输入处理库,如 RPi.GPIO 或 Adafruit CircuitPython 库,用于处理按键和拨轮的输入。
项目介绍
开发环境
- 使用官方提供的Micropython固件开发
- IDE: Thonnty
- 开发语言:Python
- 需求库:
- 第三方St7789屏幕驱动库
- PIO 支持库rp2、官方驱动库
【Thonng图】
【Thonng屏幕驱动图】
使用教程
- 不设置频率,不输出!
- 开机
- 上电自动开机,显示Logo后,进入用户界面
- 用户界面介绍
- 左侧为三个可选IO
- 右侧为IO状态
- 黑色:GND
- 红色:正在工作
- 闪烁:正在设置IO输出
- 浅蓝色:IO未使用
logo:
用户界面
- 选择IO
- 使用设备顶部的左右摇杆操作三个IO的选择;
- 左右波动可以上下选择;
- 中键按键表示选中,即进入操作IO模式
【操作界面图】
- 设置频率
- 在设置界面,向左波动摇杆,即进入频率设置界面
- 在频率设置界面,Freq和对应的IO闪烁
- 向左波动摇杆控制频率增加。
- 向右波动摇杆频率降低。
- 中间按下,保存设置,PWM开始输出。
- 设置占空比
- 在设置界面,向右波动摇杆,即进入占空比设置界面
- 在占空比设置界面,Duty和对应的IO闪烁
- 向左波动摇杆控制占空比减小。
- 向右波动摇杆占空比增加。
- 中间按下,保存设置,返回设置界面。
- 设置界面返回
- 长按S键(详见原理图)返回用户界面。
【设置占空比】
【设置频率】
【设置完成,并返回】
实现的方式及框图
软件设计思路及实现
- 软件设计:
- 初始化 LCD 显示屏:在控制程序中使用 LCD 驱动库初始化 LCD 显示屏,并设置显示所需的参数(如行数、列数等)。
- 监听按键和拨轮输入:使用输入处理库监听按键和拨轮模块的输入,并根据输入值进行相应的操作。
- 控制 PWM 生成器:使用 PIO 编程环境编写代码,通过 RP2040 开发板的 GPIO 输出引脚生成 PWM 信号,并根据拨轮调整输出频率和按键调整占空比。
- 更新 LCD 显示:根据当前的 PWM 参数和用户输入,在 LCD 显示屏上实时更新输出频率和占空比等信息。
- 用户界面设计:
- 在 LCD 显示屏上显示基本信息:设计一个用户界面,在 LCD 显示屏上显示当前的 PWM 参数(如频率、占空比)和操作指南(如使用拨轮调整频率,按键调整占空比)。
- 响应用户输入:根据用户按键和拨轮的输入,即时更新 LCD 显示屏上的 PWM 参数,并反馈给用户当前的操作状态。
软件框图

代码说明
PIO程序
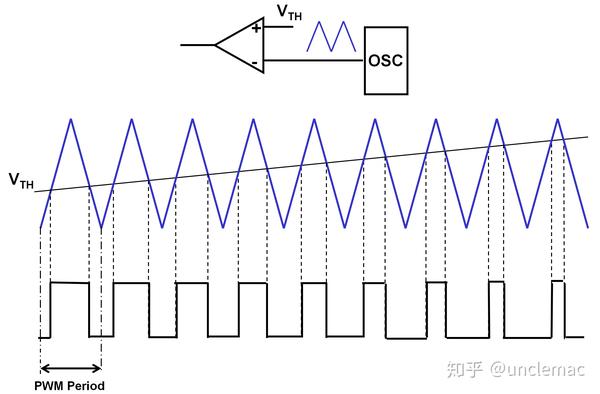
- 按照PWM生成原理编写的PIO程序
- 重装载值(计数最大值)被存出来isr寄存器,由软件pash到状态机。
- x寄存器中存储比较值(cmp),用于控制占空比
- y寄存器用于递减,并与x寄存器值比较。
# 装饰器定义引脚
@rp2.asm_pio(sideset_init=PIO.OUT_LOW)
def pwm_prog():
mov(y, isr) .side(0) # 重装载
label("loop")
jmp(x_not_y, "skip") # 比较
nop() .side(1)
label("skip")
jmp(y_dec, "loop")
锯齿波比较生成PWM示意图
PWM设置程序
- 由按键控制PWM频率及占空比改变
sleep(0.05)
self.IOShow.SetIO(self.IONum, self.IOColor16)
self.IOColor16 += 100
if self.IOColor16 >= (65535 - 100):
self.IOColor16 = 0
if 0 == self.btn.OK.value():
self.IOShow.SetIO(self.IONum, st7789.RED)
self.display.text(font3, "Duty: ", 5, 71)
break
if 0 == self.btn.L.value():
if self.CountMax >= 0 and self.CountMax < 1000:
self.Duty -= 1
if self.CountMax >= 1000 :
self.Duty = int(self.Duty - float(self.CountMax/1000))
if self.Duty <= 0 :
self.Duty = 0
if 0 == self.btn.R.value():
if self.CountMax >= 0 and self.CountMax < 1000:
self.Duty += 1
if self.CountMax >= 1000 :
self.Duty = int(float(self.CountMax/1000) + self.Duty )
if self.Duty >= self.CountMax :
self.Duty = self.CountMax
self.PWM.set(self.Duty)
self.display.text(font3,"Duty: ",5,71, self.IOColor16)
i = (self.Duty+1) / (self.CountMax+2) * 100
if i < 10:
i_formatted = '0{:.3f}'.format(i)
else:
i_formatted = '{:.3f}'.format(i)
i_rounded = str(i_formatted) + Str_Index
self.display.text(font3,i_rounded,5,89)
print("DutyMax:", self.CountMax)
print("Duty:", self.Duty)
- 配合PIO库相关函数,将占空比信息推送带状态机
- 这里对官方历程做了优化,在程序里做了mov(x, osr)这一步,那么PIO程序内就减少一个操作。
def set(self, value):
# Minimum value is -1 (completely turn off), 0 actually still produces narrow pulse
value = max(value, -1)
value = min(value, self._max_count)
self._sm.put(value)
self._sm.exec("pull(noblock)")
self._sm.exec("mov(x, osr)") # 这里放 PhWM 比较值
- 由于分辨率要求,改变频率需重新初始化状态机
class PIOPWM:
def __init__(self, sm_id, pin, max_count, count_freq):
self._sm = StateMachine(sm_id, pwm_prog, freq=count_freq*2, sideset_base=Pin(pin))
self._sm.active(1)
self._sm.put(max_count)
self._sm.exec("pull()")
self._sm.exec("mov(isr, osr)")
self._max_count = max_count
self.set(int(max_count/10))
总结
- 这块小板子可以实现很多方便的调试(传感器应用调试、调试设备等)
- PIO灵活性很高,但需要学习成本,国内PIO相关的应用太少了,希望能看到PIO推屏幕、CAN、LIN等总线或屏幕显示接口的应用。
附件下载

RP2040作业程序.7z
团队介绍
个人
评论
0 / 100
查看更多
猜你喜欢
制作FPGA电子琴1. 存储一段音乐,并可以进行音乐播放,
2. 可以自己通过板上的按键进行弹奏,支持两个按键同时按下(和弦)并且声音不能失真,板上的按键只有13个,可以通过有上方的“上“、”下”两个按键对音程进行扩展
1374
2024年寒假练 - 基于带显示屏的RP2040调试平台设计可编程PWM发生器该项目使用了Thonny软件、MicroPython语言,实现了带显示屏的、基于RP2040的多功能嵌入式编程学习、硬件调试平台的可编程PWM发生器的设计,它的主要功能为:使用PIO编程,生成3路最高重复频率为12MHz的PWM信号,且每一路的频率和占空比都可独立调节。
 pei
pei650
2024年寒假练 - 基于平台3带显示屏的、基于RP2040的多功能嵌入式编程学习、硬件调试平台完成LVGL图形化控制终端该项目使用了带显示屏的、基于RP2040的多功能嵌入式编程学习、硬件调试平台,实现了LVGL图形化控制终端的设计,它的主要功能为:车速表。
462
