内容介绍
内容介绍
项目介绍
本项目基于RP2040 Game Kit和TMF8821 dTOF传感器,设计并实现了一个空间测量系统,能够测算出板卡前方平面与传感器的夹角以及最近的垂直距离。系统通过传感器采集环境中的点云数据,将测量的距离转换为空间坐标系下的xyz坐标,并利用最小二乘法对平面进行拟合。最终通过平面法向量计算夹角和垂直距离,实现了对环境平面的几何信息测量与分析。
简短的使用到的硬件介绍
1. RP2040 Game Kit
RP2040 Game Kit是基于树莓派RP2040的嵌入式系统学习平台,USB Type-C供电,采用RP2040作为主控,支持MicroPython、C/C++编程,性能强大。
板上功能:
- 240*240分辨率的彩色IPS LCD,SPI接口,控制器为ST7789
- 四向摇杆 + 2个轻触按键 + 一个三轴姿态传感器MMA7660用做输入控制
- 板上外扩2MB Flash,预刷MicroPython的UF2固件
- 一个红外接收管 + 一个红外发射管
- 一个三轴姿态传感器MMA7660
- 一个蜂鸣器
- 双排16Pin连接器,有SPI、I2C以及2路模拟信号输入
2. TMF8821 dTOF传感器
dToF模块是基于 TMF8821 设计的直接飞行时间 (dToF) 传感器模块,TMF8821采用单个模块化封装,带有相关的 VCSEL(垂直腔面发射激光器)。dToF 设备基于 SPAD、TDC 和直方图技术,可实现 5000 mm 的检测范围。由于它的镜头位于 SPAD 上,它支持 3x3、4x4 和 3x6 多区域输出数据以及宽广的、动态可调的视野。VCSEL 上方的封装内的多透镜阵列 (MLA) 拓宽了 FoI(照明场)。原始数据的所有处理都在片上进行,TMF8821在其 I2C 接口上提供距离信息和置信度值。
方案框图和项目设计思路介绍
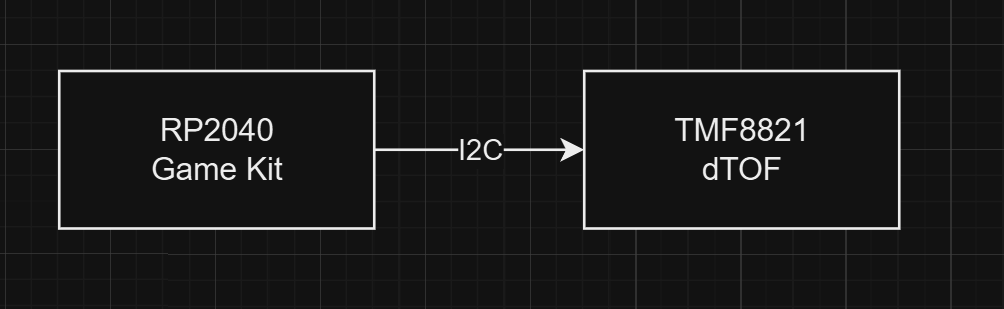
系统方案框图
项目设计思路
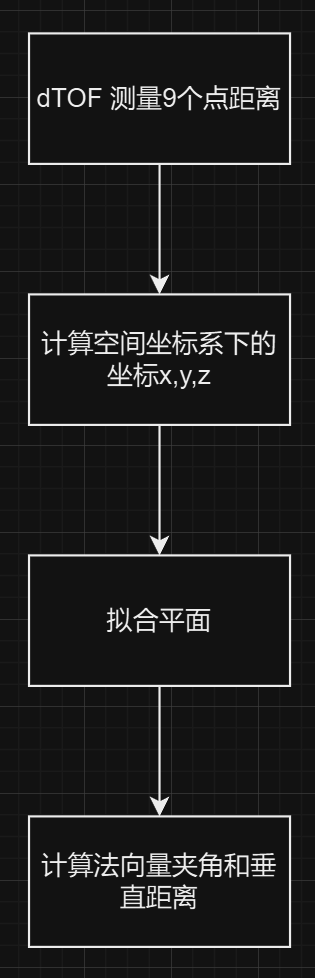
- 数据采集:使用TMF8821传感器获取目标平面上的多个距离点,每个点的距离数据通过I2C传输至RP2040。
- 坐标转换:将测量距离结合传感器的几何位置和视场角,换算为三维空间中的(x, y, z)坐标。
- 平面拟合:利用最小二乘法对多组(x, y, z)数据进行平面拟合,计算平面方程以及法向量。
- 几何计算:根据传感器平面与目标平面的法向量计算夹角,并利用平面方程计算传感器到目标平面的垂直距离。
- 结果显示:通过串口输出夹角和垂直距离,便于观察和验证效果。
软件流程图和关键代码介绍
软件流程图
关键代码介绍
1. 数据采集及坐标转换
if (myTMF882X.startMeasuring(myResults)) {
// print out results
Serial.println("Measurement:");
Serial.print(" Result Number: ");
Serial.print(myResults.result_num);
Serial.print(" Number of Results: ");
Serial.println(myResults.num_results);
for (int i = 0; i < myResults.num_results; ++i) {
Serial.print(" conf: ");
Serial.print(myResults.results[i].confidence);
Serial.print(" distance mm: ");
Serial.print(myResults.results[i].distance_mm);
Serial.print(" channel: ");
Serial.print(myResults.results[i].channel);
Serial.print(" sub_capture: ");
Serial.println(myResults.results[i].sub_capture);
}
Serial.print(" photon: ");
Serial.print(myResults.photon_count);
Serial.print(" ref photon: ");
Serial.print(myResults.ref_photon_count);
Serial.print(" ALS: ");
Serial.println(myResults.ambient_light);
Serial.println();
float angle = calculatePlaneAngle(myResults);
Serial.print("平面与传感器的夹角(度): ");
Serial.println(angle);
// 可以添加移动平均滤波使结果更稳定
// static float filteredAngle = 0;
// filteredAngle = filteredAngle * 0.8 + angle * 0.2; // 简单的低通滤波
// Serial.print("平滑后的夹角(度): ");
// Serial.println(filteredAngle);
}
2. 角度和垂直距离计算
float calculatePlaneAngle(struct tmf882x_msg_meas_results results) {
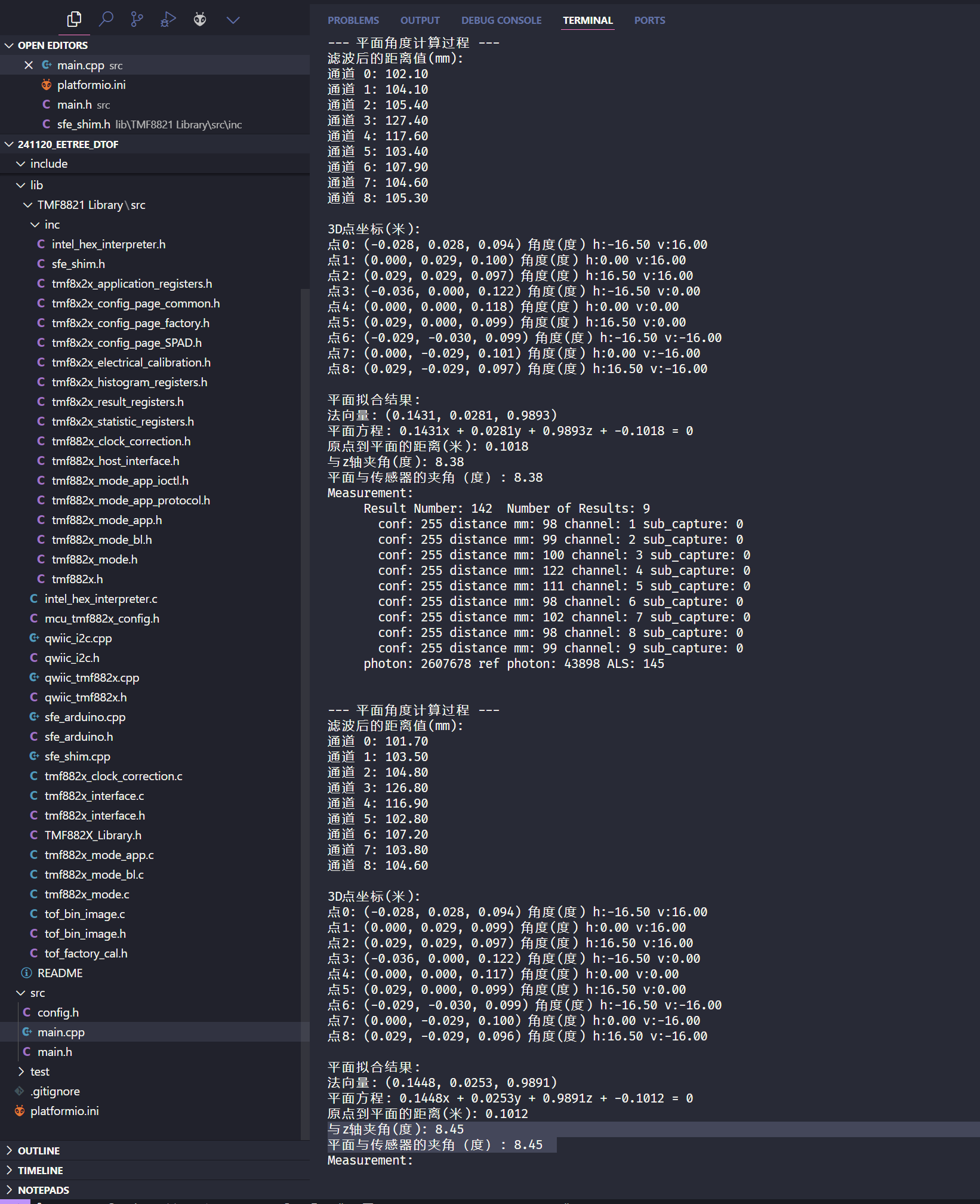
Serial.println("\n--- 平面角度计算过程 ---");
// 1. 更新历史数据并进行均值滤波
for (int i = 0; i < results.num_results; i++) {
int channel = results.results[i].channel - 1; // 将通道号1-9映射到0-8
if (channel < 0 || channel >= CHANNEL_COUNT) continue;
distanceHistory[channel][historyIndex] = results.results[i].distance_mm;
}
historyIndex = (historyIndex + 1) % FILTER_SIZE;
// 计算并打印滤波后的距离
Serial.println("滤波后的距离值(mm):");
float filteredDistances[CHANNEL_COUNT] = {0};
for (int channel = 0; channel < CHANNEL_COUNT; channel++) {
float sum = 0;
int validCount = 0;
for (int j = 0; j < FILTER_SIZE; j++) {
if (distanceHistory[channel][j] > 0) {
sum += distanceHistory[channel][j];
validCount++;
}
}
filteredDistances[channel] = validCount > 0 ? sum / validCount : 0;
Serial.print("通道 ");
Serial.print(channel);
Serial.print(": ");
Serial.println(filteredDistances[channel]);
}
// 2. 转换为3D点坐标
const int MAX_POINTS = CHANNEL_COUNT;
Point3D points[MAX_POINTS];
int validPoints = 0;
// FOV角度(弧度)
const float HFOV = 33.0f * PI / 180.0f; // 水平FOV 33度
const float VFOV = 32.0f * PI / 180.0f; // 垂直FOV 32度
// 计算每个像素的角度增量
const float h_step = HFOV / 2.0f; // 水平方向总范围的一半
const float v_step = VFOV / 2.0f; // 垂直方向总范围的一半
Serial.println("\n3D点坐标(米):");
for (int i = 0; i < CHANNEL_COUNT; i++) {
if (filteredDistances[i] <= 0) continue;
float distance = filteredDistances[i] / 1000.0f; // 转换为米
// 计算该通道的水平和垂直角度
// 将3x3网格映射到FOV范围内
// 将0,1,2位置映射到-1,0,1,然后乘以步长得到角度
float h_angle = (CHANNEL_GRID[i][0] - 1) * (h_step); // -h_step, 0, h_step
float v_angle = (1 - CHANNEL_GRID[i][1]) * (v_step); // v_step, 0, -v_step (注意y轴方向)
// 使用球坐标系转换为笛卡尔坐标系
points[validPoints].z = distance * cos(v_angle) * cos(h_angle); // 深度
points[validPoints].x = distance * cos(v_angle) * sin(h_angle); // 水平偏移
points[validPoints].y = distance * sin(v_angle); // 垂直偏移
Serial.print("点");
Serial.print(validPoints);
Serial.print(": (");
Serial.print(points[validPoints].x, 3);
Serial.print(", ");
Serial.print(points[validPoints].y, 3);
Serial.print(", ");
Serial.print(points[validPoints].z, 3);
Serial.print(") 角度(度) h:");
Serial.print(h_angle * 180.0f / PI);
Serial.print(" v:");
Serial.println(v_angle * 180.0f / PI);
validPoints++;
}
if (validPoints < 3) {
Serial.println("有效点数不足3个,无法拟合平面");
return 0.0f;
}
// 3. 使用更稳定的平面拟合方法
// 首先计算质心
Point3D centroid = {0, 0, 0};
for (int i = 0; i < validPoints; i++) {
centroid.x += points[i].x;
centroid.y += points[i].y;
centroid.z += points[i].z;
}
centroid.x /= validPoints;
centroid.y /= validPoints;
centroid.z /= validPoints;
// 构建协方差矩阵
float xx = 0, xy = 0, xz = 0, yy = 0, yz = 0, zz = 0;
for (int i = 0; i < validPoints; i++) {
float dx = points[i].x - centroid.x;
float dy = points[i].y - centroid.y;
float dz = points[i].z - centroid.z;
xx += dx * dx;
xy += dx * dy;
xz += dx * dz;
yy += dy * dy;
yz += dy * dz;
zz += dz * dz;
}
// 找到最小特征值对应的特征向量(法向量)
float det_x = yy*zz - yz*yz;
float det_y = xx*zz - xz*xz;
float det_z = xx*yy - xy*xy;
// 选择最大行列式对应的分量作为法向量
float nx, ny, nz;
if (det_x >= det_y && det_x >= det_z) {
nx = det_x;
ny = xz*yz - xy*zz;
nz = xy*yz - xz*yy;
} else if (det_y >= det_x && det_y >= det_z) {
nx = xz*yz - xy*zz;
ny = det_y;
nz = xy*xz - yz*xx;
} else {
nx = xy*yz - xz*yy;
ny = xy*xz - yz*xx;
nz = det_z;
}
// 归一化法向量
float norm = sqrt(nx*nx + ny*ny + nz*nz);
nx /= norm;
ny /= norm;
nz /= norm;
// 确保法向量指向z轴正方向
if (nz < 0) {
nx = -nx;
ny = -ny;
nz = -nz;
}
// 计算与z轴的夹角
float angle = acos(nz) * 180.0f / PI;
// 计算平面方程 ax + by + cz + d = 0 的系数
float a = nx;
float b = ny;
float c = nz;
float d = -(a*centroid.x + b*centroid.y + c*centroid.z);
// 打印调试信息
Serial.println("\n平面拟合结果:");
Serial.print("法向量: (");
Serial.print(nx, 4); Serial.print(", ");
Serial.print(ny, 4); Serial.print(", ");
Serial.print(nz, 4); Serial.println(")");
Serial.print("平面方程: ");
Serial.print(a, 4); Serial.print("x + ");
Serial.print(b, 4); Serial.print("y + ");
Serial.print(c, 4); Serial.print("z + ");
Serial.print(d, 4); Serial.println(" = 0");
float distance_to_origin = abs(d) / sqrt(a*a + b*b + c*c);
Serial.print("原点到平面的距离(米): ");
Serial.println(distance_to_origin, 4);
Serial.print("与z轴夹角(度): ");
Serial.println(angle);
return angle;
}
功能展示图及说明

项目中遇到的难题和解决方法
- 传感器数据波动
- 问题:dTOF传感器数据波动较大。
- 解决方法:对数据进行多次采样并取均值。
附件下载

241120_eetree_dTOF.zip
团队介绍
个人
评论
0 / 100
查看更多
猜你喜欢
2024艾迈斯欧司朗竞赛 -基于dTOF实现平面角度和距离测量该项目使用了TMF8821,实现了平面角度测量的设计,它的主要功能为:通过采集平面上多个点的距离,计算平面和测量点的距离和角度。。
83
【2024艾迈斯欧司朗竞赛】用TMF8821实现角度测算该项目使用了TMF8821,实现了角度测算的设计,它的主要功能为:通过获取TMF8821传感器的数据进行传感器与平面之间的夹角以及最小距离。
 无言的朝圣
无言的朝圣23
2024艾迈斯欧司朗竞赛 - 基于TMF8821的dToF传感器完成平面角度计算通过 TMF8821 dToF传感器 与 树莓派RP2040游戏机 的板卡组合,实现 测算板卡与目标平面之间的 实时夹角。
35
