2022年_10月_B题:具有自动泊车功能的电动车
一、任务
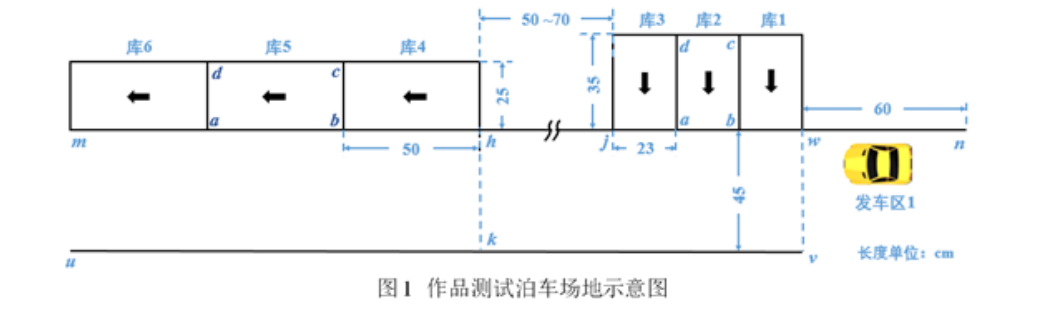
设计制作具有自动泊车功能的电动车,可在图 1 所示的作品测试泊车场地上,分别独立完成“倒车入库/出库”或“侧方入库/出库”的单项操作,也可连续完成这两项入库/出库的操作。
二、要求
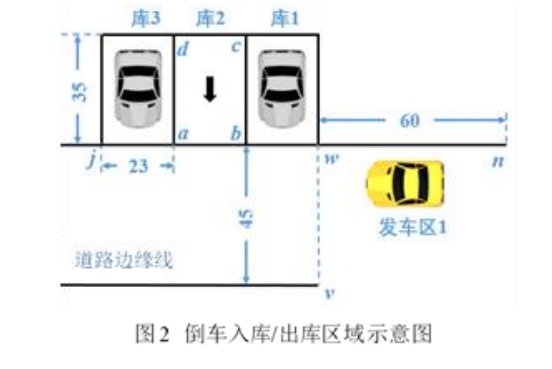
- 单项倒车入库/出库①:如图 2 所示,一键启动摆放在“发车区 1”内的电动车,电动车以“右侧垂直泊车方式”自动倒车进入库 2 内居中位置停车(详见图 2 中库区 abcd,此时库 1、库 3 内均停有车辆),倒车入库时间T1越短好(T1定义见本题说明,T1>30s 的T1测试项成绩记 0 分)。电动车在库内停车到位 5s 后,沿车头方向右转出库,车身整体出库时间不超过 15s。(20 分)
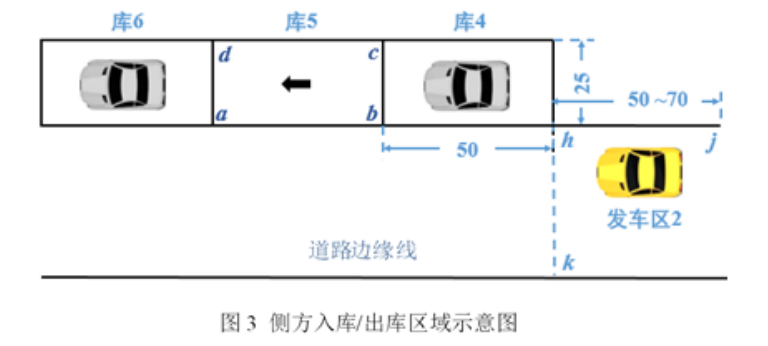
- 单项侧方入库/出库①:如图 3 所示,一键启动摆放在“发车区 2”内的电动车,电动车以“右侧平行泊车方式”自动泊入库 5 内居中位置停车(详见图 3 中库区 abcd,此时库 4、库 6 内均停有车辆),侧方入库时间T2越短越好(T2定义见本题说明,T2>30s 的T2测试项成绩记 0 分)。电动车在库内停车到位 5s 后,沿车头方向出库,车身整体出库时间不超过 15s。(20 分)
- 单项倒车入库/出库②:移除图 2 中库 1、库 3 内停放的车辆,逐条按照第(1)项要求,电动车完成“邻库无车”时的倒车入库/出库。(20 分)
- 单项侧方入库/出库②:移除图 3 中库 4、库 6 内停放的车辆,逐条按照第(2)项要求,电动车完成“邻库无车”时的侧方入库/出库。(20 分)
- 连续倒车与侧方入库/出库①:如果参赛者确认其作品能连续完成第(1)、(2)项功能要求,可直接测试本项,成功完成的将在第(1)、(2)项得分基础上加 5 分。此刻泊车场地(图 1)中的库 1、3、4、6 内均居中停有车辆。电动车自图 1 中“发车区 1”内一键启动泊车,按第(1)、(2)项要求,连续完成自动倒车及侧方入库/出库。(5 分)
- 连续倒车与侧方入库/出库②:如果参赛者确认能够连续完成第(3)、(4)项功能要求,则直接测试第(6)项,成功完成的可在第(3)、(4)项得分基础上加 5 分。此刻同时移除泊车场地(图 1)中的库 1、3、4、6 内所有停放车辆,电动车自图 1 中“发车区 1”内一键启动泊车,按照第(3)、(4)项要求,连续完成自动倒车与侧方入库/出库。(5 分)
- 其他 (10 分)
- 设计报告(20 分)
三、说明
- 电动车规定:参赛电动车必须为前轮转向式四轮车,车长投影≥25cm,车宽投影≥15cm,车高(含检测装置高度)≤30cm,禁用履带车或麦克纳姆轮。违规使用的电动车不予测试。
- 测试场地:赛区测试电动车自动泊车的场地如图 1 所示,单项泊车场地(图 2、图 3)各为赛区测试场地(图 1)的一部分,赛区测试场地不标注蓝色字符和线段,直线段 hj 长度范围 50~70cm(具体长度由赛区决定)。倒库泊车的三个车库(库 1~3)长度均为 35cm、宽度均为 23cm;侧方泊车的三个车库(库 4~6)长度均为 50cm、宽度均为 25cm。图中长方形 abcd 为泊车库,线段 ab 为“库口线”,线段 bc、cd、da 为“库边线”;线段 uv 与 mn为道路边缘线,mn 与所有“库口线”重合。泊车场地应铺白纸,纸上的黑色实线用 1.8cm 左右宽度的黑色胶带粘贴而成。
- 发车区 1:测试第(1)、(3)项及第(5)、(6)项要求的功能时,电动车应摆放于图 1 中“发车区 1”内,即车身右侧投影线距离直线段 mn 约 5cm,车头投影线距离前方虚线段 wv 约 5~30cm,测试时将随机调整该距离。
- 发车区 2:测试第(2)、(4)项要求的功能时,电动车应摆放于图 3 中“发车区 2”内,即车身右侧投影线距离直线段 mn 约 5cm,车头投影线距离前方虚线段 hk 约 5~30cm,测试时将随机调整该距离。
- 入库时间:电动车无论倒车入库还是侧方入库,都必须以倒车方式进入库 2 或库 5。电动车在库口附近启动最后入库动作(此动作前电动车须停顿 1s)时,发出第一声蜂鸣;电动车入库停车到位时,再发出第二声蜂鸣。两次蜂鸣之间的时差分别定义为“倒车入库时间T1”或“侧方入库时间T2”。
- 库内停车:电动车入库后,应尽量停泊在库 2 或库 5 的库区中部,车头方向应与库内箭头方向相同。当泊车库的邻库内停有车辆,入库电动车应尽量与邻库内停车的车头车尾对齐停车。
- 邻库车辆:库 1、库 3、库 4、库 6 内需停放的“邻库车辆”应为电动车的同型车,或自制模拟停放车辆的物体(该物体与电动车身长宽尺寸相同、高度<20cm),物体材质不限,但其内不得有任何电子元器件,测试时自带。
- 失误扣分:电动车泊车过程中,出现以下三项操作失误的将按规则扣分:
- 测试要求:如电动车能够完成“连续倒车与侧方入库/出库”,应直接测试第(5)或第(6)项;如电动车不能完成“连续倒车与侧方入库/出库”,可选择单独测试第(1)、(2)项或第(3)、(4)项,此后将不再测试第(5)或(6)项。每项最多允许测试两次,各项测试成绩以最好的一次成绩为准,满分时,该项不测第二次。
- 其他说明:电动车检测泊车库区的技术方法不限,但不得借助车载自检测装置(不得超出车身外沿)以外的任何检测电路、遥控装置与网络资源,电动车泊车全程禁止人工介入。
- 补充建议:建议借鉴驾照考核科目 2“倒车入库/出库”、“侧方入库/出库”操作规则;也可查看网上科目 2 视频,参考其动作要领。
GPT-4o给出的设计方案:
一、系统概述
本设计方案旨在制作一个具有自动泊车功能的电动小车,能够分别完成“倒车入库/出库”和“侧方位停车入库/出库”的单项操作,也可以连续完成该两项入库/出库的操作。具体要求如下:
- 倒车入库/出库:按照图2所示路径完成操作。
- 侧方位停车入库/出库:按照图3所示路径完成操作。
- 支持连续完成倒车和侧方位停车的操作。
二、硬件设计
1. 传感器模块
(1)、超声波传感器
- 用于检测车周围的障碍物和距离。布置在小车前后和两侧,确保实时监测环境信息。
(2)、红外传感器
- 用于精确检测地面上的停车框线。布置在车底,确保能够准确识别停车位置。
(3)、陀螺仪和加速度计
- 检测车身姿态和移动方向。确保转弯和直行过程中姿态稳定。
2. 导航与控制模块
(1)、主控MCU(如TI的MSP430或TIVA系列)
- 负责处理所有传感器数据、控制电机和通信模块,实现自动驾驶功能。
(2)、电机驱动模块
- 使用H桥电机驱动模块(如L298N),控制小车的前进、后退、左右转向等操作。
- 结合PWM信号,实现精准控制速度和方向。
3. 电源模块
(1)、充电电池
- 提供小车运动的主要能源,确保长时间稳健运行。
- 包括电池管理系统(BMS),保证充电和放电过程中的安全性。
三、软件设计
1. 控制算法
(1)、驱动控制
- 通过MCU产生的PWM信号,控制电机速度和方向。
- 实现前进、后退、左转、右转和停止功能。
(2)、路径规划
- 根据超声波传感器数据,计算小车当前位置和目标位置之间的路径。
- 使用Dijkstra算法或A*算法,规划最优路径,避开障碍物。
(3)、动作序列
- 定义倒车入库/出库和侧方位停车入库/出库的一系列预定动作。
- 根据传感器反馈,实时调整动作序列,确保小车准确入库和出库。
2. 状态检测与反馈
- 传感器数据处理: 实时收集并处理超声波、红外线和陀螺仪数据,判断当前小车位置和姿态。
- 动作反馈: 对比实际运动轨迹与预定路径,根据偏差实时调节电机驱动参数。
3. 软件流程
- 初始化: MCU启动后初始化各模块,进行传感器校准。
- 路径规划: 根据用户选择的操作(如倒车入库/出库、侧方位停车),进行路径规划。
- 执行动作: 控制电机执行预定动作序列,根据传感器反馈调整路径。
- 状态判断: 判断入库/出库操作是否成功,给出提示或重新调整。
四、调试与测试
1. 硬件调试
- 传感器校准: 调整超声波和红外传感器的灵敏度和精度。
- 电机驱动测试: 校验电机在不同PWM信号下的响应速度和稳定性。
2. 软件调试
- 路径规划算法: 测试在各种复杂环境下的路径规划能力,确保避障效果。
- 控制算法: 调整PID控制参数,确保直线行驶和转弯过程中的平稳性和精确性。
3. 综合测试
- 单项操作测试: 模拟实际测试场地,分别测试倒车入库/出库和侧方位停车入库/出库功能,确保成功率。
- 连续操作测试: 测试连续执行两个单项操作的能力,确保切换平滑,操作准确。
五、系统优化
1. 提高传感器精度
- 优化传感器数据处理算法,提升距离检测和位置识别的精度。
2. 提高控制算法效率
- 优化路径规划和PID参数调整,提升系统响应速度和操作稳定性。
3. 增强系统鲁棒性
- 在不同环境条件下进行测试和优化,保证系统在各种复杂环境中的稳定性和可靠性。
六、总结
通过上述设计方案,可以实现一个具有自动泊车功能的电动小车,能够分别完成倒车入库/出库和侧方位停车入库/出库操作,并能连续完成两个单项操作。不仅满足了题目要求,还通过优化传感器、控制算法和系统鲁棒性,确保系统的高效、稳定和可靠。
该题目考察的知识点:
- 自动泊车系统设计:从硬件和软件方面综合设计自动泊车系统,包括传感器的选择和安装、数据处理以及泊车控制算法的实现。
- 传感器技术:理解并应用超声波传感器、红外传感器和摄像头等技术,从而实现对目标车位和障碍物的精准检测。
- 嵌入式系统:包括MCU(微控制单元)的选型、编程和调试,使系统能够实时响应外部传感器输入并做出相应决策。
- 电机控制:实现对电动车电机的精确控制,涵盖前进、后退和转向动作。
- 无线通信:掌握无线模块的使用,实现遥控器与电动车之间的通信。
- 系统集成:综合考察传感器数据获取、信号处理以及电机控制等多方面技术,最终实现自动泊车功能。
- 算法实现:包括路径规划、障碍物避让等算法的实现和优化。
