内容介绍
内容介绍
1. 项目介绍
本项目旨在设计并实现一个基于iCE40UP5K FPGA与ACS712电流传感器的SPI接口OLED电流表。该电流表能够实时测量电路中的电流,并通过OLED显示屏显示电流值。项目的主要目标是利用FPGA的高速处理能力和ACS712的高精度电流检测特性,实现一个低成本、高精度的电流测量设备。该设备适用于电子实验室、嵌入式系统开发以及电力监控等场景。
2. 硬件介绍
- iCE40UP5K FPGA:iCE40UP5K是Lattice公司推出的一款低功耗、高性能的FPGA芯片。它具有5280个逻辑单元、1MB的嵌入式RAM以及多个PLL(锁相环),适合用于需要高速数据处理和灵活逻辑设计的应用场景。在本项目中,iCE40UP5K负责处理ACS712传感器的模拟信号,并通过SPI接口与OLED显示屏通信。
- ACS712电流传感器:ACS712是基于霍尔效应的电流传感器,能够测量交流和直流电流。它具有低噪声、高灵敏度的特点,测量范围可达±5A、±20A或±30A(根据型号不同)。在本项目中,ACS712用于检测电路中的电流,并输出与电流大小成正比的模拟电压信号。
- OLED显示屏:本项目使用的OLED显示屏为0.96英寸、128x64分辨率的SPI接口显示屏。它具有高对比度、低功耗的特点,适合用于显示实时电流值和其他相关信息。
- 其他硬件:项目还使用了杜邦线,用于连接传感器模块。
3. 方案框图和项目设计思路
方案框图
+-------------------+ +-------------------+ +-------------------+
| | | | | |
| ACS712电流传感器 | ----> | iCE40UP5K FPGA | ----> | OLED显示屏 |
| | | | | |
+-------------------+ +-------------------+ +-------------------+
项目设计思路
- 电流检测:ACS712传感器通过霍尔效应检测电路中的电流,并输出一个与电流大小成正比的模拟电压信号。该信号经过ADC(模数转换器)转换为数字信号,供FPGA处理。
- 信号处理:iCE40UP5K FPGA负责对ADC输出的数字信号进行处理。首先,FPGA对信号进行滤波,以消除噪声和误差。然后,FPGA根据ACS712的灵敏度参数计算出实际的电流值。
- 数据显示:FPGA通过SPI接口将计算出的电流值发送到OLED显示屏。OLED显示屏实时显示电流值,并根据需要显示其他信息,如单位(A/mA)。
4. 软件流程图和关键代码介绍
软件流程图
+-------------------+
| 初始化FPGA和外设 |
+-------------------+
|
v
+-------------------+
| 读取ACS712传感器数据 |
+-------------------+
|
v
+-------------------+
| 信号滤波和校准 |
+-------------------+
|
v
+-------------------+
| 计算电流值 |
+-------------------+
|
v
+-------------------+
| 通过SPI发送数据到OLED|
+-------------------+
|
v
+-------------------+
| 显示电流值 |
+-------------------+
|
v
+-------------------+
| 等待下一次采样 |
+-------------------+
关键代码介绍
- ADC读取代码:
verilogmodule ADC_top (
i_clk_in, //comment out to use internal clock
i_rst_in,
i_analog_cmp,
o_digital_out,
o_analog_out,
o_sample_rdy
);
parameter
ADC_WIDTH = 8, // ADC Convertor Bit Precision
ACCUM_BITS = 10, // 2^ACCUM_BITS is decimation rate of accumulator
LPF_DEPTH_BITS = 3, // 2^LPF_DEPTH_BITS is decimation rate of averager
INPUT_TOPOLOGY = 0; // 0: DIRECT: Analog input directly connected to + input of comparator
// 1: NETWORK:Analog input connected through R divider to - input of comp.
//input ports
input i_clk_in; // 3.33Mhz on Control Demo board
input i_rst_in;
input i_analog_cmp; // from LVDS buffer or external comparitor
//output ports
output o_analog_out; // feedback to RC network
output o_sample_rdy;
output [ADC_WIDTH-1:0] o_digital_out; // connected to I2C register.
//**********************************************************************
//
// Internal Wire & Reg Signals
//
//**********************************************************************
wire clk;
wire analog_out_i;
wire sample_rdy_i;
wire [ADC_WIDTH-1:0] digital_out_i;
wire [ADC_WIDTH-1:0] digital_out_abs;
assign rst_i = i_rst_in;
assign clk = i_clk_in;
//***********************************************************************
//
// SSD ADC using onboard LVDS buffer or external comparator
//
//***********************************************************************
sigmadelta_adc #(
.ADC_WIDTH(ADC_WIDTH),
.ACCUM_BITS(ACCUM_BITS),
.LPF_DEPTH_BITS(LPF_DEPTH_BITS)
)
SSD_ADC(
.clk(clk),
.rstn(rst_i),
.analog_cmp(i_analog_cmp),
.digital_out(digital_out_i),
.analog_out(analog_out_i),
.sample_rdy(sample_rdy_i)
);
assign digital_out_abs = INPUT_TOPOLOGY ? ~digital_out_i : digital_out_i;
//***********************************************************************
//
// output assignments
//
//***********************************************************************
assign o_digital_out = digital_out_abs;
assign o_analog_out = analog_out_i;
assign o_sample_rdy = sample_rdy_i;
endmodule - 电流计算代码:
verilogassign calc_adc_out = sd_adc_out*4'b1101;
// 计算 diff_mv
assign diff_mv = {12'b0, calc_adc_out} - 12'd2496; // 扩展为 24-bit 以避免溢出
// 乘以 1000
assign scaled_value = diff_mv * 24'd1000;
// 除以 66
assign divided_value = scaled_value / 24'd66;
// 将结果截断为 12-bit
assign final_ma = divided_value[11:0]; - SPI通信代码:
verilogmodule OLED12864
(
input clk, //12MHz系统时钟
input rst_n, //系统复位,低有效
input [15:0] volNum, //输入电压
output reg oled_csn, //OLCD液晶屏使能
output reg oled_rst, //OLCD液晶屏复位
output reg oled_dcn, //OLCD数据指令控制
output reg oled_clk, //OLCD时钟信号
output reg oled_dat //OLCD数据信号
);
localparam INIT_DEPTH = 16'd23; //LCD初始化的命令的数量
localparam IDLE = 7'h1, MAIN = 7'h2, INIT = 7'h4, SCAN = 7'h8, WRITE = 7'h10, DELAY = 7'h20,CHINESE=7'h40;
localparam HIGH = 1'b1, LOW = 1'b0;
localparam DATA = 1'b1, CMD = 1'b0;
reg [7:0] cmd [22:0];
reg [39:0] mem [122:0];
reg [127:0] mem_hanzi[16:0];
reg [7:0] mem_hanzi_num;
reg [7:0] y_p, x_ph, x_pl;
reg [(8*21-1):0] char;
reg [7:0] num, char_reg;
reg [4:0] cnt_main, cnt_init, cnt_scan, cnt_write;
reg [5:0] cnt_chinese;
reg [15:0] num_delay, cnt_delay, cnt;
reg [6:0] state, state_back;
reg[7:0] temp_data;
always @ (posedge clk or negedge rst_n) begin
if(!rst_n) begin
cnt_main <= 1'b0; cnt_init <= 1'b0; cnt_scan <= 1'b0; cnt_write <= 1'b0;cnt_chinese <= 1'b0;
y_p <= 1'b0; x_ph <= 1'b0; x_pl <= 1'b0;
num <= 1'b0; char <= 1'b0; char_reg <= 1'b0;
num_delay <= 16'd5; cnt_delay <= 1'b0; cnt <= 1'b0;
oled_csn <= HIGH; oled_rst <= HIGH; oled_dcn <= CMD; oled_clk <= HIGH; oled_dat <= LOW;
state <= IDLE; state_back <= IDLE;
temp_data<= 0;
end else begin
case(state)
IDLE:begin
cnt_main <= 1'b0; cnt_init <= 1'b0; cnt_scan <= 1'b0; cnt_write <= 1'b0;
y_p <= 1'b0; x_ph <= 1'b0; x_pl <= 1'b0;
num <= 1'b0; char <= 1'b0; char_reg <= 1'b0;
num_delay <= 16'd5; cnt_delay <= 1'b0; cnt <= 1'b0;mem_hanzi_num<=8'd0;
oled_csn <= HIGH; oled_rst <= HIGH; oled_dcn <= CMD; oled_clk <= HIGH; oled_dat <= LOW;
state <= MAIN; state_back <= MAIN;
end
MAIN:begin
//if(cnt_main >= 5'd14) cnt_main <= 5'd15;//接下来执行空操作,实现数据只刷新一次
if(cnt_main >= 5'd13) cnt_main <= 5'd9;//接下来执行空操作,实现数据只刷新一次
else cnt_main <= cnt_main + 1'b1;
temp_data <= temp_data +1'b1;
case(cnt_main) //MAIN状态
5'd0 : begin state <= INIT; end
5'd1 : begin y_p <= 8'hb0; x_ph <= 8'h10; x_pl <= 8'h00; num <= 5'd16; char <= " ";state <= SCAN; end
5'd2 : begin y_p <= 8'hb1; x_ph <= 8'h10; x_pl <= 8'h00; num <= 5'd16; char <= " ";state <= SCAN; end
5'd3 : begin y_p <= 8'hb2; x_ph <= 8'h10; x_pl <= 8'h00; num <= 5'd16; char <= " ";state <= SCAN; end
5'd4 : begin y_p <= 8'hb3; x_ph <= 8'h10; x_pl <= 8'h00; num <= 5'd16; char <= " ";state <= SCAN; end
5'd5 : begin y_p <= 8'hb4; x_ph <= 8'h10; x_pl <= 8'h00; num <= 5'd16; char <= " ";state <= SCAN; end
5'd6 : begin y_p <= 8'hb5; x_ph <= 8'h10; x_pl <= 8'h00; num <= 5'd16; char <= " ";state <= SCAN; end
5'd7 : begin y_p <= 8'hb6; x_ph <= 8'h10; x_pl <= 8'h00; num <= 5'd16; char <= " ";state <= SCAN; end
5'd8 : begin y_p <= 8'hb3; x_ph <= 8'h10; x_pl <= 8'h00; num <= 5'd16; char <= "current ";state <= SCAN; end
//5'd9 : begin y_p <= 8'hb0; x_ph <= 8'h12; x_pl <= 8'h00; mem_hanzi_num <= 8'd8; state <= CHINESE; end
//5'd10: begin y_p <= 8'hb0; x_ph <= 8'h13; x_pl <= 8'h00; mem_hanzi_num <= 8'd10; state <= CHINESE; end
//5'd11 : begin y_p <= 8'hb0; x_ph <= 8'h14; x_pl <= 8'h00; mem_hanzi_num <= 8'd12; state <= CHINESE; end
//5'd12: begin y_p <= 8'hb0; x_ph <= 8'h15; x_pl <= 8'h00; mem_hanzi_num <= 8'd14; state <= CHINESE; end
5'd9 : begin y_p <= 8'hb5; x_ph <= 8'h12; x_pl <= 8'h00; num <= 5'd1; char <= volNum[15:12];state <= SCAN; end
5'd10 : begin y_p <= 8'hb5; x_ph <= 8'h13; x_pl <= 8'h00; num <= 5'd1; char <= "."; state <= SCAN; end
5'd11 : begin y_p <= 8'hb5; x_ph <= 8'h14; x_pl <= 8'h00; num <= 5'd1; char <= volNum[11:8];state <= SCAN; end
5'd12 : begin y_p <= 8'hb5; x_ph <= 8'h15; x_pl <= 8'h00; num <= 5'd1; char <= volNum[7:4];state <= SCAN; end
5'd13: begin y_p <= 8'hb5; x_ph <= 8'h16; x_pl <= 8'h00; num <= 5'd1; char <= volNum[3:0] ;state <= SCAN; end
//default: state <= IDLE; //如果你需要动态刷新一些信息,此行应该取消注释
endcase
end
INIT:begin //初始化状态
case(cnt_init)
5'd0: begin oled_rst <= LOW; cnt_init <= cnt_init + 1'b1; end //复位有效
5'd1: begin num_delay <= 16'd25000; state <= DELAY; state_back <= INIT; cnt_init <= cnt_init + 1'b1; end //延时大于3us
5'd2: begin oled_rst <= HIGH; cnt_init <= cnt_init + 1'b1; end //复位恢复
5'd3: begin num_delay <= 16'd25000; state <= DELAY; state_back <= INIT; cnt_init <= cnt_init + 1'b1; end //延时大于220us
5'd4: begin
if(cnt>=INIT_DEPTH) begin //当25条指令及数据发出后,配置完成
cnt <= 1'b0;
cnt_init <= cnt_init + 1'b1;
end else begin
cnt <= cnt + 1'b1; num_delay <= 16'd5;
oled_dcn <= CMD; char_reg <= cmd[cnt]; state <= WRITE; state_back <= INIT;
end
end
5'd5: begin cnt_init <= 1'b0; state <= MAIN; end //初始化完成,返回MAIN状态
default: state <= IDLE;
endcase
end
SCAN:begin //刷屏状态,从RAM中读取数据刷屏
if(cnt_scan == 5'd11) begin
if(num) cnt_scan <= 5'd3;
else cnt_scan <= cnt_scan + 1'b1;
end
else if(cnt_scan == 5'd12) cnt_scan <= 1'b0;
else cnt_scan <= cnt_scan + 1'b1;
case(cnt_scan)
5'd 0: begin oled_dcn <= CMD; char_reg <= y_p; state <= WRITE; state_back <= SCAN; end //定位列页地址
5'd 1: begin oled_dcn <= CMD; char_reg <= x_pl; state <= WRITE; state_back <= SCAN; end //定位行地址低位
5'd 2: begin oled_dcn <= CMD; char_reg <= x_ph; state <= WRITE; state_back <= SCAN; end //定位行地址高位
5'd 3: begin num <= num - 1'b1;end
5'd 4: begin oled_dcn <= DATA; char_reg <= 8'h00; state <= WRITE; state_back <= SCAN; end //将5*8点阵编程8*8
5'd 5: begin oled_dcn <= DATA; char_reg <= 8'h00; state <= WRITE; state_back <= SCAN; end //将5*8点阵编程8*8
5'd 6: begin oled_dcn <= DATA; char_reg <= 8'h00; state <= WRITE; state_back <= SCAN; end //将5*8点阵编程8*8
5'd 7: begin oled_dcn <= DATA; char_reg <= mem[char[(num*8)+:8]][39:32]; state <= WRITE; state_back <= SCAN; end
5'd 8: begin oled_dcn <= DATA; char_reg <= mem[char[(num*8)+:8]][31:24]; state <= WRITE; state_back <= SCAN; end
5'd 9: begin oled_dcn <= DATA; char_reg <= mem[char[(num*8)+:8]][23:16]; state <= WRITE; state_back <= SCAN; end
5'd10: begin oled_dcn <= DATA; char_reg <= mem[char[(num*8)+:8]][15: 8]; state <= WRITE; state_back <= SCAN; end
5'd11: begin oled_dcn <= DATA; char_reg <= mem[char[(num*8)+:8]][ 7: 0]; state <= WRITE; state_back <= SCAN; end
5'd12: begin state <= MAIN; end
default: state <= IDLE;
endcase
end
CHINESE:begin //显示汉字
if(cnt_chinese == 6'd38) cnt_chinese <= 1'b0;
else cnt_chinese <= cnt_chinese+1'b1;
case(cnt_chinese)
6'd 0: begin oled_dcn <= CMD; char_reg <= y_p; state <= WRITE; state_back <= CHINESE; end //定位列页地址
6'd 1: begin oled_dcn <= CMD; char_reg <= x_pl; state <= WRITE; state_back <= CHINESE; end //定位行地址低位
6'd 2: begin oled_dcn <= CMD; char_reg <= x_ph; state <= WRITE; state_back <= CHINESE; end //定位行地址高位
6'd3 : begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][127:120]; state <= WRITE; state_back <= CHINESE; end
6'd4 : begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][119:112]; state <= WRITE; state_back <= CHINESE; end
6'd5 : begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][111:104]; state <= WRITE; state_back <= CHINESE; end
6'd6 : begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][103:96] ; state <= WRITE; state_back <= CHINESE; end
6'd7 : begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][95:88] ; state <= WRITE; state_back <= CHINESE; end
6'd8 : begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][87:80] ; state <= WRITE; state_back <= CHINESE; end
6'd9 : begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][79:72] ; state <= WRITE; state_back <= CHINESE; end
6'd10: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][71:64] ; state <= WRITE; state_back <= CHINESE; end
6'd11: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][63:56]; state <= WRITE; state_back <= CHINESE; end
6'd12: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][55:48]; state <= WRITE; state_back <= CHINESE; end
6'd13: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][47:40]; state <= WRITE; state_back <= CHINESE; end
6'd14: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][39:32]; state <= WRITE; state_back <= CHINESE; end
6'd15: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][31:24]; state <= WRITE; state_back <= CHINESE; end
6'd16: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][23:16]; state <= WRITE; state_back <= CHINESE; end
6'd17: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][15: 8]; state <= WRITE; state_back <= CHINESE; end
6'd18: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num][ 7: 0]; state <= WRITE; state_back <= CHINESE; end
6'd19: begin oled_dcn <= CMD; char_reg <= y_p+1; state <= WRITE; state_back <= CHINESE; end //定位列页地址
6'd20: begin oled_dcn <= CMD; char_reg <= x_pl; state <= WRITE; state_back <= CHINESE; end //定位行地址低位
6'd21: begin oled_dcn <= CMD; char_reg <= x_ph; state <= WRITE; state_back <= CHINESE; end //定位行地址高位
6'd22: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][127:120]; state <= WRITE; state_back <= CHINESE; end
6'd23: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][119:112]; state <= WRITE; state_back <= CHINESE; end
6'd24: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][111:104]; state <= WRITE; state_back <= CHINESE; end
6'd25: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][103:96] ; state <= WRITE; state_back <= CHINESE; end
6'd26: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][95:88] ; state <= WRITE; state_back <= CHINESE; end
6'd27: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][87:80] ; state <= WRITE; state_back <= CHINESE; end
6'd28: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][79:72] ; state <= WRITE; state_back <= CHINESE; end
6'd29: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][71:64] ; state <= WRITE; state_back <= CHINESE; end
6'd30: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][63:56]; state <= WRITE; state_back <= CHINESE; end
6'd31: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][55:48]; state <= WRITE; state_back <= CHINESE; end
6'd32: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][47:40]; state <= WRITE; state_back <= CHINESE; end
6'd33: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][39:32]; state <= WRITE; state_back <= CHINESE; end
6'd34: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][31:24]; state <= WRITE; state_back <= CHINESE; end
6'd35: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][23:16]; state <= WRITE; state_back <= CHINESE; end
6'd36: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][15: 8]; state <= WRITE; state_back <= CHINESE; end
6'd37: begin oled_dcn <= DATA; char_reg <= mem_hanzi[mem_hanzi_num+1][ 7: 0]; state <= WRITE; state_back <= CHINESE; end
6'd38: begin state <= MAIN; end
default: state <= IDLE;
endcase
end
WRITE:begin //WRITE状态,将数据按照SPI时序发送给屏幕
if(cnt_write >= 5'd17) cnt_write <= 1'b0;
else cnt_write <= cnt_write + 1'b1;
case(cnt_write)
5'd 0: begin oled_csn <= LOW; end //9位数据最高位为命令数据控制位
5'd 1: begin oled_clk <= LOW; oled_dat <= char_reg[7]; end //先发高位数据
5'd 2: begin oled_clk <= HIGH; end
5'd 3: begin oled_clk <= LOW; oled_dat <= char_reg[6]; end
5'd 4: begin oled_clk <= HIGH; end
5'd 5: begin oled_clk <= LOW; oled_dat <= char_reg[5]; end
5'd 6: begin oled_clk <= HIGH; end
5'd 7: begin oled_clk <= LOW; oled_dat <= char_reg[4]; end
5'd 8: begin oled_clk <= HIGH; end
5'd 9: begin oled_clk <= LOW; oled_dat <= char_reg[3]; end
5'd10: begin oled_clk <= HIGH; end
5'd11: begin oled_clk <= LOW; oled_dat <= char_reg[2]; end
5'd12: begin oled_clk <= HIGH; end
5'd13: begin oled_clk <= LOW; oled_dat <= char_reg[1]; end
5'd14: begin oled_clk <= HIGH; end
5'd15: begin oled_clk <= LOW; oled_dat <= char_reg[0]; end //后发低位数据
5'd16: begin oled_clk <= HIGH; end
5'd17: begin oled_csn <= HIGH; state <= DELAY; end //
default: state <= IDLE;
endcase
end
DELAY:begin //延时状态
if(cnt_delay >= num_delay) begin
cnt_delay <= 16'd0; state <= state_back;
end else cnt_delay <= cnt_delay + 1'b1;
end
default:state <= IDLE;
endcase
end
end
//OLED配置指令数据
always@(posedge rst_n)
begin
cmd[0 ] = {8'hae};
cmd[1 ] = {8'hd5};
cmd[2 ] = {8'h80};
cmd[3 ] = {8'ha8};
cmd[4 ] = {8'h3f};
cmd[5 ] = {8'hd3};
cmd[6 ] = {8'h00};
cmd[7 ] = {8'h40};
cmd[8 ] = {8'h8d};
cmd[9 ] = {8'h14};
cmd[10] = {8'h20};
cmd[11] = {8'h02};
cmd[12] = {8'hc8};
cmd[13] = {8'ha1};
cmd[14] = {8'hda};
cmd[15] = {8'h12};
cmd[16] = {8'h81};
cmd[17] = {8'hcf};
cmd[18] = {8'hd9};
cmd[19] = {8'hf1};
cmd[20] = {8'hdb};
cmd[21] = {8'h40};
cmd[22] = {8'haf};
end
//5*8点阵字库数据
always@(posedge rst_n)
begin
mem[ 0] = {8'h3E, 8'h51, 8'h49, 8'h45, 8'h3E}; // 48 0
mem[ 1] = {8'h00, 8'h42, 8'h7F, 8'h40, 8'h00}; // 49 1
mem[ 2] = {8'h42, 8'h61, 8'h51, 8'h49, 8'h46}; // 50 2
mem[ 3] = {8'h21, 8'h41, 8'h45, 8'h4B, 8'h31}; // 51 3
mem[ 4] = {8'h18, 8'h14, 8'h12, 8'h7F, 8'h10}; // 52 4
mem[ 5] = {8'h27, 8'h45, 8'h45, 8'h45, 8'h39}; // 53 5
mem[ 6] = {8'h3C, 8'h4A, 8'h49, 8'h49, 8'h30}; // 54 6
mem[ 7] = {8'h01, 8'h71, 8'h09, 8'h05, 8'h03}; // 55 7
mem[ 8] = {8'h36, 8'h49, 8'h49, 8'h49, 8'h36}; // 56 8
mem[ 9] = {8'h06, 8'h49, 8'h49, 8'h29, 8'h1E}; // 57 9
mem[ 10] = {8'h7C, 8'h12, 8'h11, 8'h12, 8'h7C}; // 65 A
mem[ 11] = {8'h7F, 8'h49, 8'h49, 8'h49, 8'h36}; // 66 B
mem[ 12] = {8'h3E, 8'h41, 8'h41, 8'h41, 8'h22}; // 67 C
mem[ 13] = {8'h7F, 8'h41, 8'h41, 8'h22, 8'h1C}; // 68 D
mem[ 14] = {8'h7F, 8'h49, 8'h49, 8'h49, 8'h41}; // 69 E
mem[ 15] = {8'h7F, 8'h09, 8'h09, 8'h09, 8'h01}; // 70 F
mem[ 32] = {8'h00, 8'h00, 8'h00, 8'h00, 8'h00}; // 32 sp
mem[ 33] = {8'h00, 8'h00, 8'h2f, 8'h00, 8'h00}; // 33 !
mem[ 34] = {8'h00, 8'h07, 8'h00, 8'h07, 8'h00}; // 34
mem[ 35] = {8'h14, 8'h7f, 8'h14, 8'h7f, 8'h14}; // 35 #
mem[ 36] = {8'h24, 8'h2a, 8'h7f, 8'h2a, 8'h12}; // 36 $
mem[ 37] = {8'h62, 8'h64, 8'h08, 8'h13, 8'h23}; // 37 %
mem[ 38] = {8'h36, 8'h49, 8'h55, 8'h22, 8'h50}; // 38 &
mem[ 39] = {8'h00, 8'h05, 8'h03, 8'h00, 8'h00}; // 39 '
mem[ 40] = {8'h00, 8'h1c, 8'h22, 8'h41, 8'h00}; // 40 (
mem[ 41] = {8'h00, 8'h41, 8'h22, 8'h1c, 8'h00}; // 41 )
mem[ 42] = {8'h14, 8'h08, 8'h3E, 8'h08, 8'h14}; // 42 *
mem[ 43] = {8'h08, 8'h08, 8'h3E, 8'h08, 8'h08}; // 43 +
mem[ 44] = {8'h00, 8'h00, 8'hA0, 8'h60, 8'h00}; // 44 ,
mem[ 45] = {8'h08, 8'h08, 8'h08, 8'h08, 8'h08}; // 45 -
mem[ 46] = {8'h00, 8'h60, 8'h60, 8'h00, 8'h00}; // 46 .
mem[ 47] = {8'h20, 8'h10, 8'h08, 8'h04, 8'h02}; // 47 /
mem[ 48] = {8'h3E, 8'h51, 8'h49, 8'h45, 8'h3E}; // 48 0
mem[ 49] = {8'h00, 8'h42, 8'h7F, 8'h40, 8'h00}; // 49 1
mem[ 50] = {8'h42, 8'h61, 8'h51, 8'h49, 8'h46}; // 50 2
mem[ 51] = {8'h21, 8'h41, 8'h45, 8'h4B, 8'h31}; // 51 3
mem[ 52] = {8'h18, 8'h14, 8'h12, 8'h7F, 8'h10}; // 52 4
mem[ 53] = {8'h27, 8'h45, 8'h45, 8'h45, 8'h39}; // 53 5
mem[ 54] = {8'h3C, 8'h4A, 8'h49, 8'h49, 8'h30}; // 54 6
mem[ 55] = {8'h01, 8'h71, 8'h09, 8'h05, 8'h03}; // 55 7
mem[ 56] = {8'h36, 8'h49, 8'h49, 8'h49, 8'h36}; // 56 8
mem[ 57] = {8'h06, 8'h49, 8'h49, 8'h29, 8'h1E}; // 57 9
mem[ 58] = {8'h00, 8'h36, 8'h36, 8'h00, 8'h00}; // 58 :
mem[ 59] = {8'h00, 8'h56, 8'h36, 8'h00, 8'h00}; // 59 ;
mem[ 60] = {8'h08, 8'h14, 8'h22, 8'h41, 8'h00}; // 60 <
mem[ 61] = {8'h14, 8'h14, 8'h14, 8'h14, 8'h14}; // 61 =
mem[ 62] = {8'h00, 8'h41, 8'h22, 8'h14, 8'h08}; // 62 >
mem[ 63] = {8'h02, 8'h01, 8'h51, 8'h09, 8'h06}; // 63 ?
mem[ 64] = {8'h32, 8'h49, 8'h59, 8'h51, 8'h3E}; // 64 @
mem[ 65] = {8'h7C, 8'h12, 8'h11, 8'h12, 8'h7C}; // 65 A
mem[ 66] = {8'h7F, 8'h49, 8'h49, 8'h49, 8'h36}; // 66 B
mem[ 67] = {8'h3E, 8'h41, 8'h41, 8'h41, 8'h22}; // 67 C
mem[ 68] = {8'h7F, 8'h41, 8'h41, 8'h22, 8'h1C}; // 68 D
mem[ 69] = {8'h7F, 8'h49, 8'h49, 8'h49, 8'h41}; // 69 E
mem[ 70] = {8'h7F, 8'h09, 8'h09, 8'h09, 8'h01}; // 70 F
mem[ 71] = {8'h3E, 8'h41, 8'h49, 8'h49, 8'h7A}; // 71 G
mem[ 72] = {8'h7F, 8'h08, 8'h08, 8'h08, 8'h7F}; // 72 H
mem[ 73] = {8'h00, 8'h41, 8'h7F, 8'h41, 8'h00}; // 73 I
mem[ 74] = {8'h20, 8'h40, 8'h41, 8'h3F, 8'h01}; // 74 J
mem[ 75] = {8'h7F, 8'h08, 8'h14, 8'h22, 8'h41}; // 75 K
mem[ 76] = {8'h7F, 8'h40, 8'h40, 8'h40, 8'h40}; // 76 L
mem[ 77] = {8'h7F, 8'h02, 8'h0C, 8'h02, 8'h7F}; // 77 M
mem[ 78] = {8'h7F, 8'h04, 8'h08, 8'h10, 8'h7F}; // 78 N
mem[ 79] = {8'h3E, 8'h41, 8'h41, 8'h41, 8'h3E}; // 79 O
mem[ 80] = {8'h7F, 8'h09, 8'h09, 8'h09, 8'h06}; // 80 P
mem[ 81] = {8'h3E, 8'h41, 8'h51, 8'h21, 8'h5E}; // 81 Q
mem[ 82] = {8'h7F, 8'h09, 8'h19, 8'h29, 8'h46}; // 82 R
mem[ 83] = {8'h46, 8'h49, 8'h49, 8'h49, 8'h31}; // 83 S
mem[ 84] = {8'h01, 8'h01, 8'h7F, 8'h01, 8'h01}; // 84 T
mem[ 85] = {8'h3F, 8'h40, 8'h40, 8'h40, 8'h3F}; // 85 U
mem[ 86] = {8'h1F, 8'h20, 8'h40, 8'h20, 8'h1F}; // 86 V
mem[ 87] = {8'h3F, 8'h40, 8'h38, 8'h40, 8'h3F}; // 87 W
mem[ 88] = {8'h63, 8'h14, 8'h08, 8'h14, 8'h63}; // 88 X
mem[ 89] = {8'h07, 8'h08, 8'h70, 8'h08, 8'h07}; // 89 Y
mem[ 90] = {8'h61, 8'h51, 8'h49, 8'h45, 8'h43}; // 90 Z
mem[ 91] = {8'h00, 8'h7F, 8'h41, 8'h41, 8'h00}; // 91 [
mem[ 92] = {8'h55, 8'h2A, 8'h55, 8'h2A, 8'h55}; // 92 .
mem[ 93] = {8'h00, 8'h41, 8'h41, 8'h7F, 8'h00}; // 93 ]
mem[ 94] = {8'h04, 8'h02, 8'h01, 8'h02, 8'h04}; // 94 ^
mem[ 95] = {8'h40, 8'h40, 8'h40, 8'h40, 8'h40}; // 95 _
mem[ 96] = {8'h00, 8'h01, 8'h02, 8'h04, 8'h00}; // 96 '
mem[ 97] = {8'h20, 8'h54, 8'h54, 8'h54, 8'h78}; // 97 a
mem[ 98] = {8'h7F, 8'h48, 8'h44, 8'h44, 8'h38}; // 98 b
mem[ 99] = {8'h38, 8'h44, 8'h44, 8'h44, 8'h20}; // 99 c
mem[100] = {8'h38, 8'h44, 8'h44, 8'h48, 8'h7F}; // 100 d
mem[101] = {8'h38, 8'h54, 8'h54, 8'h54, 8'h18}; // 101 e
mem[102] = {8'h08, 8'h7E, 8'h09, 8'h01, 8'h02}; // 102 f
mem[103] = {8'h18, 8'hA4, 8'hA4, 8'hA4, 8'h7C}; // 103 g
mem[104] = {8'h7F, 8'h08, 8'h04, 8'h04, 8'h78}; // 104 h
mem[105] = {8'h00, 8'h44, 8'h7D, 8'h40, 8'h00}; // 105 i
mem[106] = {8'h40, 8'h80, 8'h84, 8'h7D, 8'h00}; // 106 j
mem[107] = {8'h7F, 8'h10, 8'h28, 8'h44, 8'h00}; // 107 k
mem[108] = {8'h00, 8'h41, 8'h7F, 8'h40, 8'h00}; // 108 l
mem[109] = {8'h7C, 8'h04, 8'h18, 8'h04, 8'h78}; // 109 m
mem[110] = {8'h7C, 8'h08, 8'h04, 8'h04, 8'h78}; // 110 n
mem[111] = {8'h38, 8'h44, 8'h44, 8'h44, 8'h38}; // 111 o
mem[112] = {8'hFC, 8'h24, 8'h24, 8'h24, 8'h18}; // 112 p
mem[113] = {8'h18, 8'h24, 8'h24, 8'h18, 8'hFC}; // 113 q
mem[114] = {8'h7C, 8'h08, 8'h04, 8'h04, 8'h08}; // 114 r
mem[115] = {8'h48, 8'h54, 8'h54, 8'h54, 8'h20}; // 115 s
mem[116] = {8'h04, 8'h3F, 8'h44, 8'h40, 8'h20}; // 116 t
mem[117] = {8'h3C, 8'h40, 8'h40, 8'h20, 8'h7C}; // 117 u
mem[118] = {8'h1C, 8'h20, 8'h40, 8'h20, 8'h1C}; // 118 v
mem[119] = {8'h3C, 8'h40, 8'h30, 8'h40, 8'h3C}; // 119 w
mem[120] = {8'h44, 8'h28, 8'h10, 8'h28, 8'h44}; // 120 x
mem[121] = {8'h1C, 8'hA0, 8'hA0, 8'hA0, 8'h7C}; // 121 y
mem[122] = {8'h44, 8'h64, 8'h54, 8'h4C, 8'h44}; // 122 z
end
endmodule
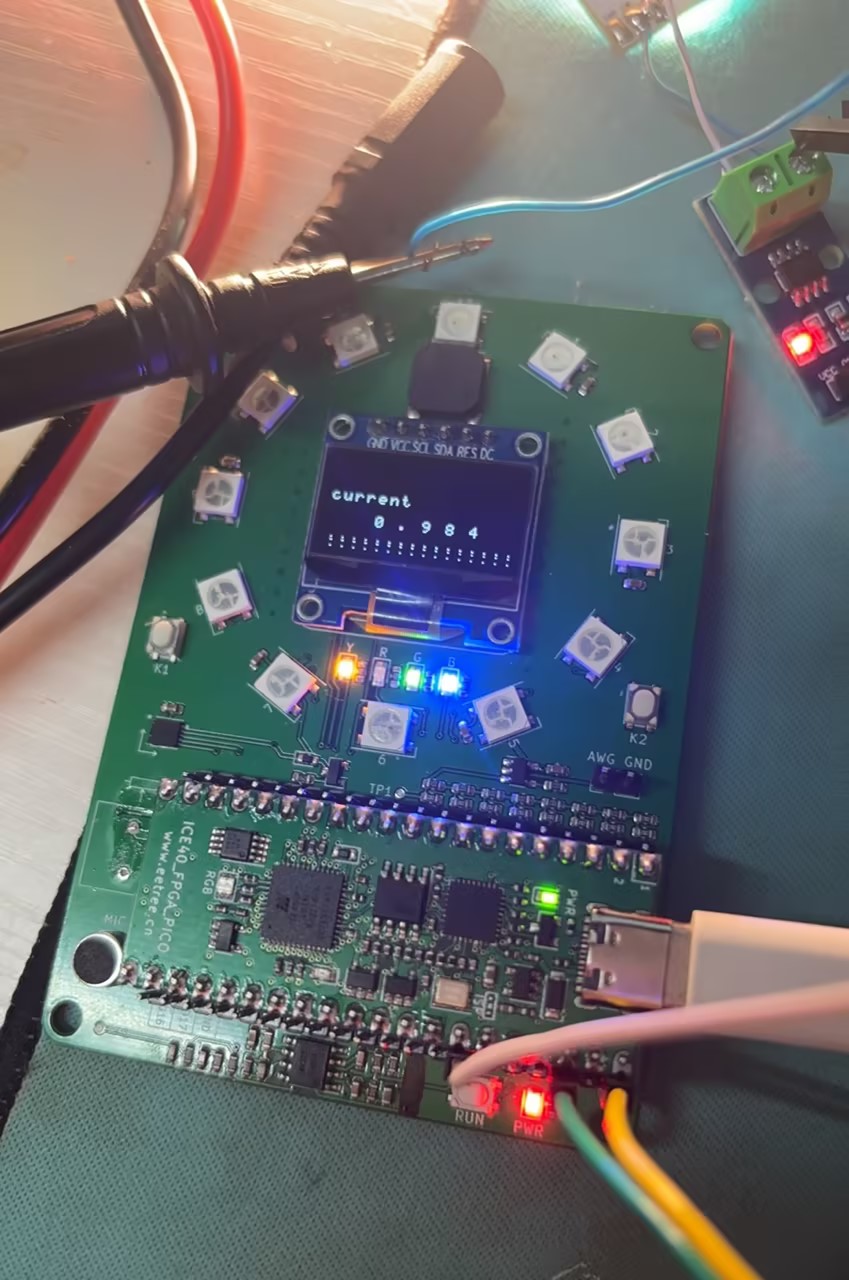
5. 功能展示图及说明
- 功能展示图:测量电流值
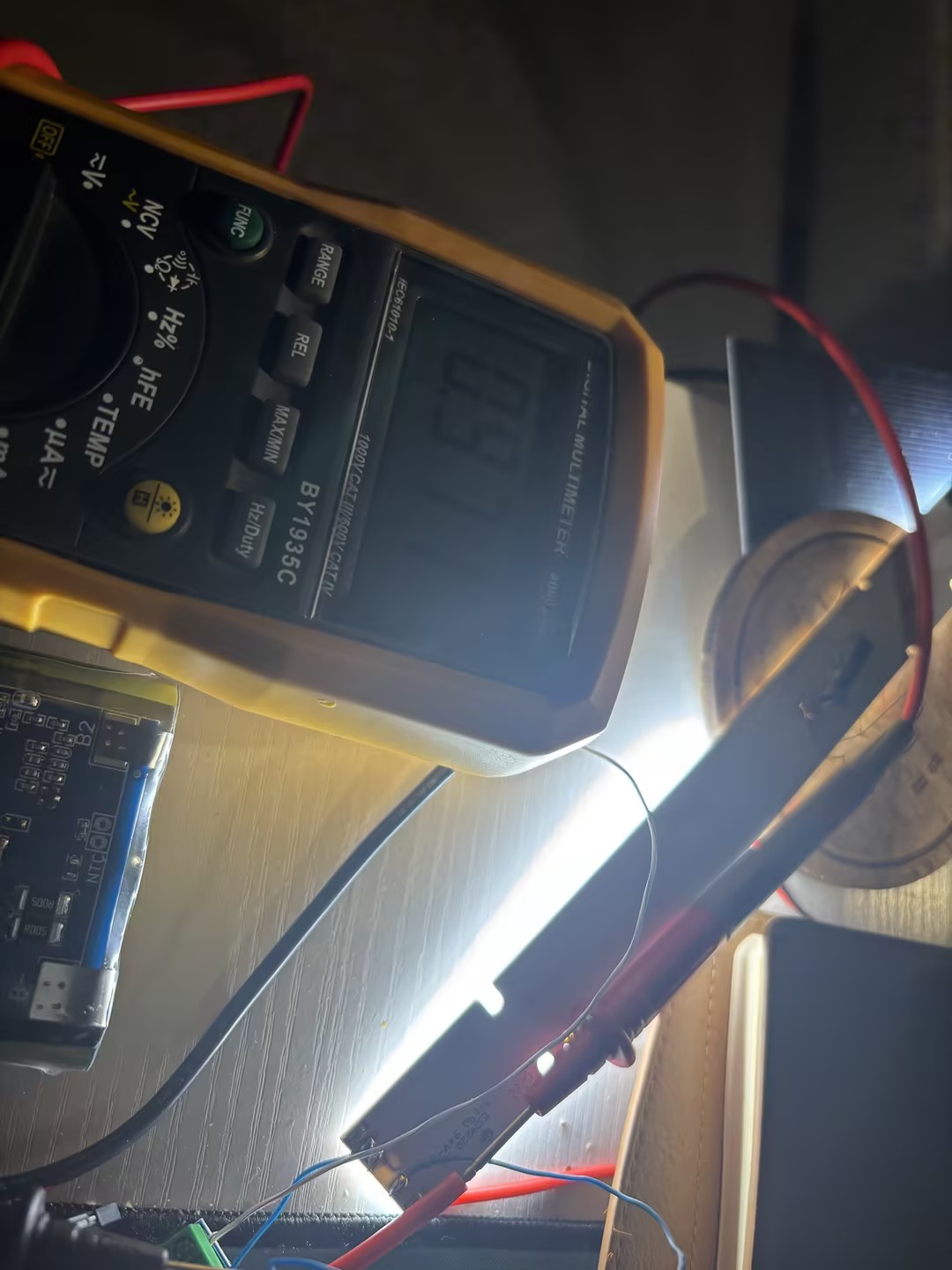
- 万用表测量值
- 说明:
- 电流测量:OLED显示屏实时显示电路中的电流值,单位为A。
- 此方案实现的ADC为8bit,精度可能相对不足,故与万用表测量数值存在一定程度不同。
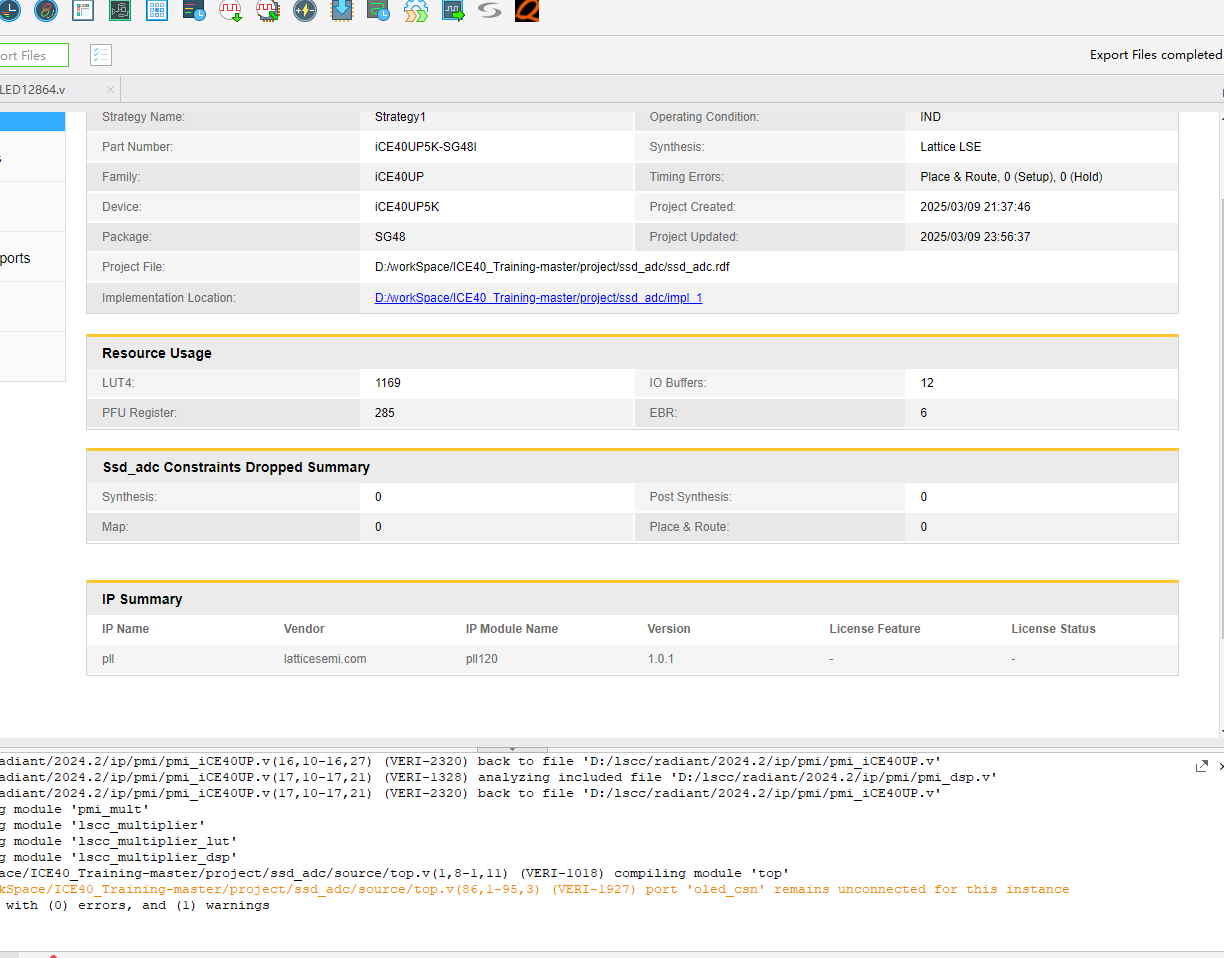
- 资源占用截图
6. 项目中遇到的难题和解决方法
- 难题1:SPI通信时序问题
- 问题描述:FPGA与OLED显示屏的SPI通信时序不稳定,导致显示数据错误。
- 解决方法:通过调整FPGA的时钟分频和SPI通信的延时参数,解决了时序问题。
7. 对本次活动的心得体会
通过本次项目,我深刻体会到了FPGA在嵌入式系统中的强大能力。iCE40UP5K FPGA不仅能够高效处理复杂的数字信号,还能灵活地与其他外设进行通信。同时,ACS712电流传感器的高精度和低噪声特性也为项目的成功奠定了基础。
在项目实施过程中,我遇到了许多挑战,如信号噪声、通信时序等问题,但通过不断调试和优化,最终解决了这些问题。这让我认识到,硬件设计和软件开发是一个需要耐心和细致的过程,任何细节的疏忽都可能导致项目失败。
此外,本次项目也让我对SPI通信协议有了更深入的理解。SPI作为一种高速、全双工的通信协议,在嵌入式系统中应用广泛,掌握其原理和实现方法对未来的项目开发具有重要意义。
对于未来的改进,我计划在项目中加入更多的功能,如数据存储、无线传输等,以进一步提升设备的实用性和智能化水平。
8. 意见或建议
- 建议1:在项目初期,应更加注重硬件选型和电路设计,避免因硬件不匹配导致的后期调试困难。
- 建议2:在FPGA开发中,建议使用成熟的IP核和开发工具,以提高开发效率和代码可靠性。
- 建议3:对于类似的项目,可以考虑加入更多的用户交互功能,如触摸屏、语音提示等,以提升用户体验。
总之,本次项目不仅让我掌握了FPGA和电流传感器的应用,还让我积累了宝贵的项目开发经验。希望未来能有更多类似的机会,进一步提升自己的技术能力。
软硬件
元器件


电路图
附件下载

ssd_adc_impl_1.rbt
可执行固件
eetree-adc-current-meter-final.7z
整体工程源码压缩包
团队介绍
个人开发者
评论
0 / 100
查看更多
猜你喜欢


