一.项目介绍
本项目基于TMF8821 dToF传感器模块和STM32G431单片机实现角度测算功能,要求如下:
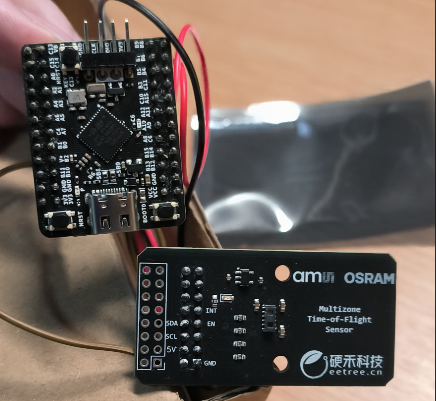
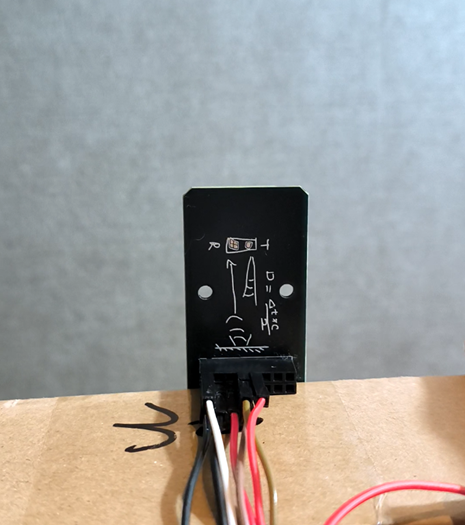
将板卡组合后固定,并保证与面前的平面存在一定夹角,通过程序测算出板卡距离平面的夹角和垂直最小距离。
二.硬件介绍
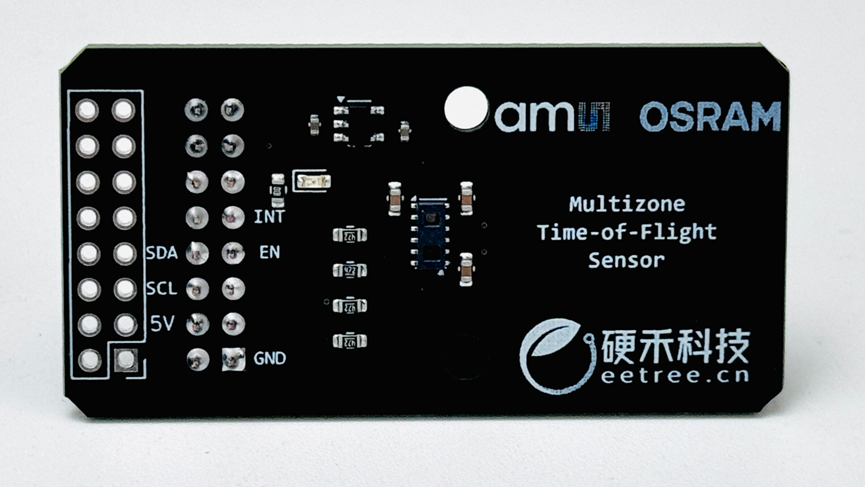
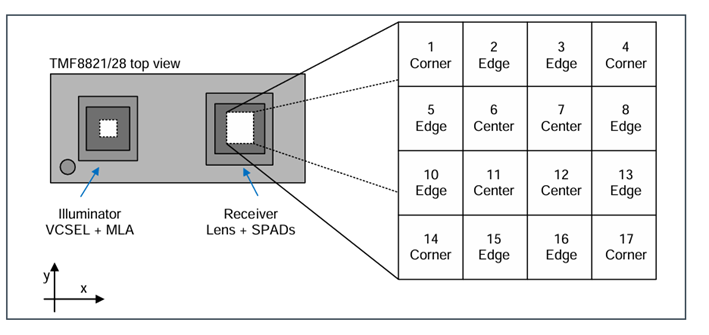
TMF8821是一款直接飞行时间(dToF)传感器,采用单一模组封装,配有VCSEL。这款dToF器件采用SPAD、TDC和直方图技术,实现了5000 mm的检测范围。SPAD上装配有透镜,可支持3×3、4×4和3×6多区输出数据和动态可调的视场角。封装内部配有多透镜阵列(MLA),位于VCSEL上方,可拓宽FoI(发射角)。所有原始数据的处理都在片上进行,TMF8821通过其I2C接口提供距离信息以及置信度值。
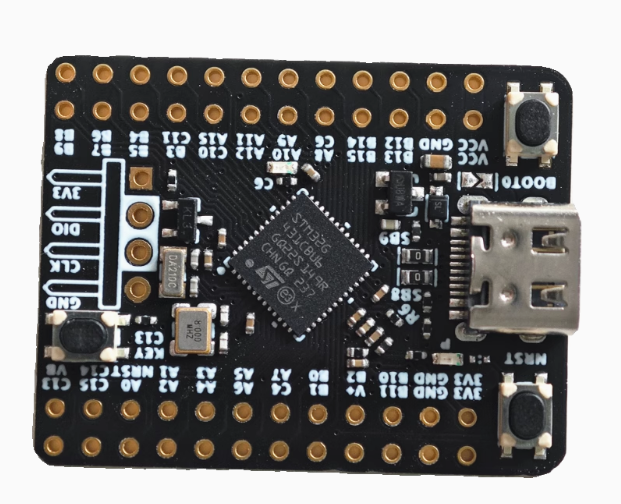
STM32G431基于高性能Arm® Cortex®-M4 32位RISC内核,带有单精度浮点运算单元 (FPU),支持所有Arm单精度数据处理指令和所有数据类型,I2C支持增强快速模式 (1 Mbps)。
三.设计思路

设备驱动上,官方提供了基于Arduino的c语言例程,基于该例程修改了抽象层(shim.c/.h)来适配STM32 HAL库实现简单驱动。
通过更改SPAD掩码使用4x4区域测量
经过查询资料,发现可以使用最小二乘法拟合平面实现角度测算和距离测量,流程如下
- 坐标系转换:
将距离数据转换到笛卡尔坐标系
使用球坐标变换公式,考虑传感器的视场角
- 平面拟合:
使用最小二乘法拟合平面方程 z = ax + by + c
通过解线性方程组得到平面参数
- 角度计算:
用平面法向量计算俯仰角(pitch)和横滚角(roll)
使用atan2函数确保角度方向的正确性
- 距离计算:
计算传感器到平面的垂直距离
使用平面方程常数项进行归一化计算
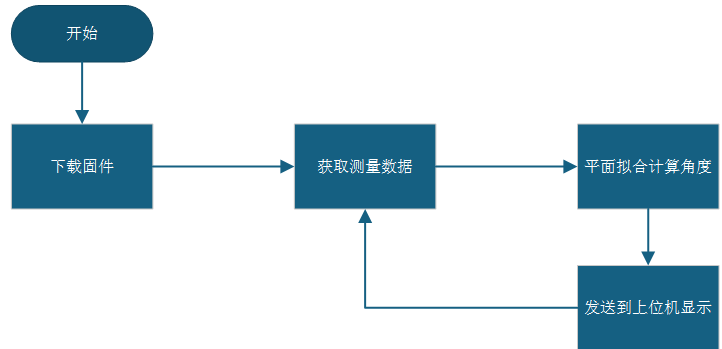
获取结果后即可通过串口发送到上位机。
四.软件流程及关键代码
4.1 部分抽象层代码,实现i2c,延时,GPIO,串口打印等功能
// I2C写寄存器
int8_t i2cTxReg(void *dptr, uint8_t slaveAddr, uint8_t regAddr, uint16_t toTx, const uint8_t *txData) {
HAL_StatusTypeDef status = HAL_I2C_Mem_Write(TMF8828_I2C_HANDLE, slaveAddr << 1, regAddr, I2C_MEMADD_SIZE_8BIT, (uint8_t *)txData, toTx, HAL_MAX_DELAY);
return (status == HAL_OK) ? I2C_SUCCESS : I2C_ERR_TIMEOUT;
}
// I2C读寄存器
int8_t i2cRxReg(void *dptr, uint8_t slaveAddr, uint8_t regAddr, uint16_t toRx, uint8_t *rxData) {
HAL_StatusTypeDef status = HAL_I2C_Mem_Read(TMF8828_I2C_HANDLE, slaveAddr << 1, regAddr, I2C_MEMADD_SIZE_8BIT, rxData, toRx, HAL_MAX_DELAY);
return (status == HAL_OK) ? I2C_SUCCESS : I2C_ERR_TIMEOUT;
}
// 替换enablePinHigh函数
void enablePinHigh(tmf8828Driver *driver)
{
HAL_GPIO_WritePin(ENABLE_GPIO_PORT, ENABLE_PIN, GPIO_PIN_SET);
}
// 替换enablePinLow函数
void enablePinLow(tmf8828Driver *driver)
{
HAL_GPIO_WritePin(ENABLE_GPIO_PORT, ENABLE_PIN, GPIO_PIN_RESET);
}
4.2 最小二乘法拟合平面实现角度测算和距离测量
// 将角度转换为弧度
double deg2rad(double deg) {
return deg * PI / 180.0;
}
// 计算平面角度和距离
void calculate_plane(float distances[4][4], float *pitch, float *roll, float *distance) {
float x[16], y[16], z[16];
int idx = 0;
// 将距离数据转换为三维坐标
for (int i = 0; i < 4; i++) {
for (int j = 0; j < 4; j++) {
float dist = distances[i][j];
// 计算水平和垂直角度
float theta = deg2rad((j - 1.5) * PIXEL_FOV_X); // 水平方位角
float phi = deg2rad((1.5-i) * PIXEL_FOV_Y); // 垂直俯仰角
// 转换为笛卡尔坐标系
x[idx] = dist * sin(theta) * cos(phi);
y[idx] = dist * sin(phi);
z[idx] = dist * cos(theta) * cos(phi);
idx++;
}
}
// 构建最小二乘方程组
float sum_x = 0, sum_y = 0, sum_z = 0;
float sum_x2 = 0, sum_xy = 0, sum_xz = 0;
float sum_y2 = 0, sum_yz = 0;
for (int k = 0; k < 16; k++) {
sum_x += x[k];
sum_y += y[k];
sum_z += z[k];
sum_x2 += x[k] * x[k];
sum_xy += x[k] * y[k];
sum_xz += x[k] * z[k];
sum_y2 += y[k] * y[k];
sum_yz += y[k] * z[k];
}
// 构造矩阵方程 [a, b, c]
float matrix[3][3] = {
{sum_x2, sum_xy, sum_x},
{sum_xy, sum_y2, sum_y},
{sum_x, sum_y, 16}
};
float vector[3] = {sum_xz, sum_yz, sum_z};
// 解线性方程组(使用克莱姆法则)
float det = matrix[0][0] * (matrix[1][1]*matrix[2][2] - matrix[1][2]*matrix[2][1])
- matrix[0][1] * (matrix[1][0]*matrix[2][2] - matrix[1][2]*matrix[2][0])
+ matrix[0][2] * (matrix[1][0]*matrix[2][1] - matrix[1][1]*matrix[2][0]);
if (fabs(det) < 1e-6) {
*pitch = *roll = *distance = 0;
return;
}
float a = (vector[0] * (matrix[1][1]*matrix[2][2] - matrix[1][2]*matrix[2][1]) -
matrix[0][1] * (vector[1]*matrix[2][2] - matrix[1][2]*vector[2]) +
matrix[0][2] * (vector[1]*matrix[2][1] - matrix[1][1]*vector[2])) / det;
float b = (matrix[0][0] * (vector[1]*matrix[2][2] - matrix[1][2]*vector[2]) -
vector[0] * (matrix[1][0]*matrix[2][2] - matrix[1][2]*matrix[2][0]) +
matrix[0][2] * (matrix[1][0]*vector[2] - vector[1]*matrix[2][0]) )/ det;
float c = (matrix[0][0] * (matrix[1][1]*vector[2] - vector[1]*matrix[2][1]) -
matrix[0][1] * (matrix[1][0]*vector[2] - vector[1]*matrix[2][0]) +
vector[0] * (matrix[1][0]*matrix[2][1] - matrix[1][1]*matrix[2][0]) )/ det;
// 计算平面参数
float norm = sqrt(a*a + b*b + 1);
float nx = a / norm;
float ny = b / norm;
float nz = 1.0 / norm;
// 计算角度(单位:度)
*pitch = atan2(ny, nz) * 180.0 / PI; // 俯仰角
*roll = atan2(nx, nz) * 180.0 / PI; // 横滚角
*distance = fabs(c) / sqrt(a*a + b*b + 1); // 垂直距离
}
五.功能展示
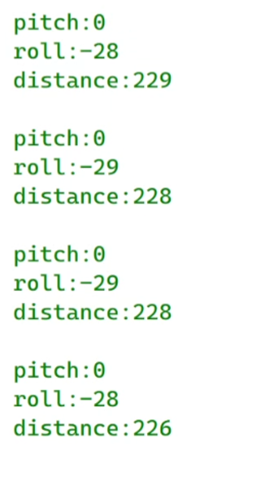
可以测量出俯仰角,横滚角和垂直距离
六.遇到的问题
调试时对于3x3,4x4模式的调节和输出的数据格式产生了一些问题,阅读官方文档后可以解决。
七.感想与体会
本项目是我第一次从零开始上手使用一款模块,还是比较有挑战性。积累了光学传感器和多文件编程的经验。未来期望再次参加活动,了解并学习更多的知识,掌握更多的技能,开拓电子芯片在生活中运用的视野。

