项目需求
完全使用WebIDE的图形化编程,使用常规的74系列的元器件,构建一个交通灯控制系统:
- 在数码管上显示计时信息 - 图形化
- 蜂鸣器报警 - 图形化
- 接近传感器检测人员走近 -Verilog
- 环境光感知,自动点亮路灯(小脚丫核心板上的单色LED)- Verilog
软硬件平台
1. Diamond
Diamond 是莱迪思半导体为其 FPGA 产品打造的设计软件,支持 Verilog、VHDL 等设计输入,集成综合引擎,有强大布局布线与时序分析功能,能进行仿真、功耗计算,支持多 IP 核,界面友好且支持双系统,适用于物联网、消费电子等成本与功耗敏感场景。
2. WebIDE
小脚丫FPGA是一款专为FPGA初学者设计的开发平台,特别适合学习数字电路和Verilog编程。它基于Lattice MXO2系列芯片,支持瞬时上电启动和U盘模式下载,用户只需将生成的.jed文件拖入虚拟U盘即可完成配置,无需安装驱动程序。小脚丫还提供了WebIDE,用户可以通过浏览器在线完成FPGA的编程、编译和下载,操作简单直观,支持Windows、Mac OS和Linux等操作系统。此外,WebIDE内置了丰富的示例项目和教学资源,帮助用户快速上手并理解FPGA应用.
3. STEP Baseboard4.0底板+STEP MXO2 LPC核心板
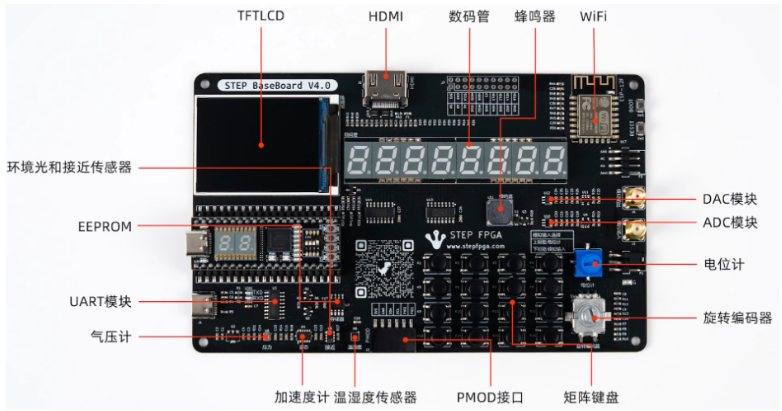
STEP BaseBoard V4.0是第4代小脚丫FPGA扩展底板,可以用于全系列小脚丫核心板的功能扩展,采用100mm*161.8mm的黄金比例尺寸,板子集成了存储器、温湿度传感器、接近式传感器、矩阵键盘、旋转编码器、HDMI接口、RGBLCD液晶屏、8个7位数码管、蜂鸣器模块、UART通信模块、ADC模块、DAC模块和WIFI通信模块,配合小脚丫FPGA板能够完成多种实验,是数字逻辑、微机原理、可编程逻辑语言以及EDA设计工具等课程完美的实验平台。
功能框图
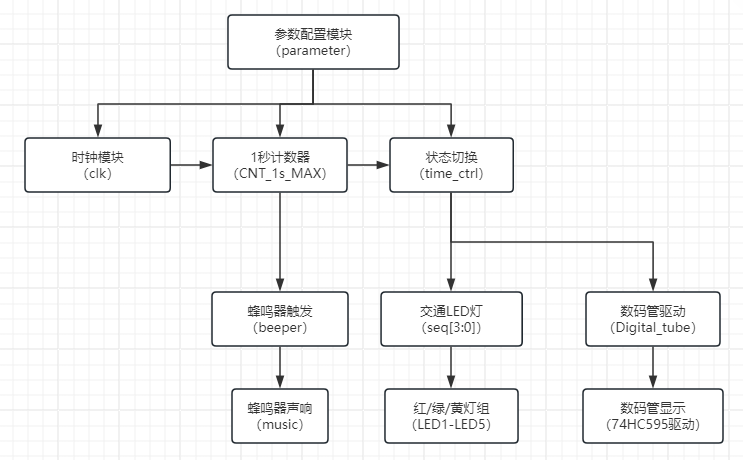
(1)图形化部分框图
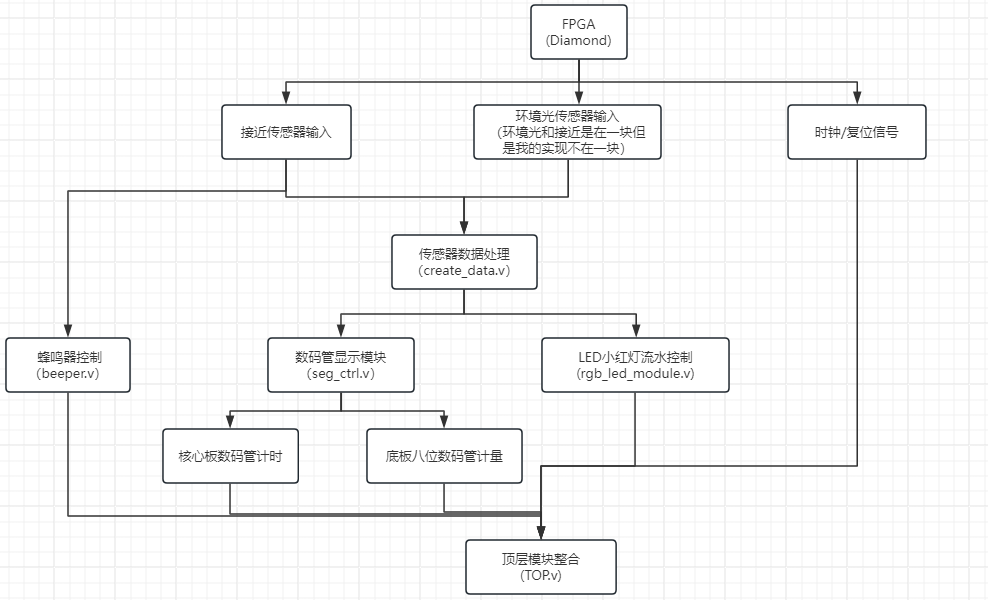
(2)Verilog部分框图
设计思路
WebIDE的链接:stepfpga
图形化数码管显示模块
首先是功能是实时显示交通灯倒计时信息
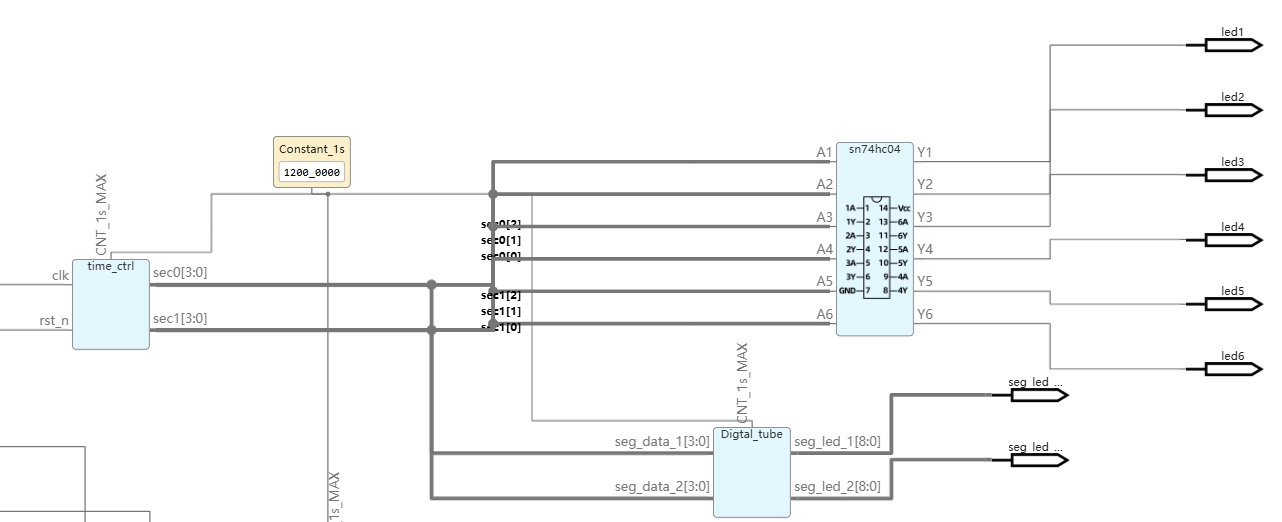
实现逻辑是:首先来自计数器模块(CNT_1s_MAX)的二进制计时数值,再使用74系列芯片(74HC595移位寄存器)将二进制数值转换为数码管段码。再通过动态扫描方式来驱动多位数码管。且在状态机模块(time_ctrl)根据交通灯的阶段(红灯/绿灯/黄灯)发送当前倒计时目标值。再倒计时结束时触发数码管闪烁(通过seq_tdn_2逻辑控制)
蜂鸣器报警模块
在倒黄灯时发出警示音。
实现逻辑是:当计数器(CNT_1s_MAX)达到设定阈值(如1s或3s)时激活。使用74HC04反相器(图中标注sn74hc-c04)增强驱动能力。通过PWM信号控制蜂鸣器频率(图中标注music参数配置为none或特定频率)。
create_data.v
核心功能是 计时与时间数据生成,具体实现以下两点:
秒级计时器
在环境光感知场景中,周期性触发数据更新(例如每秒更新一次环境光强度)。
在接近传感器触发时,为数码管显示提供时间基准(如累计触发时长)。
时间数据格式化
输出 sec0(秒个位)和 sec1(秒十位)的 BCD码,可直接驱动数码管显示模块(如 seg_ctrl.v)。
module create_data #(
parameter CNT_1s_MAX = 12_000_000 // 12MHz时钟,1秒的周期
)
(
input clk, // 12MHz时钟输入
input rst_n, // 低有效复位信号
output wire [3:0] sec0, // 秒的个位
output wire [3:0] sec1 // 秒的十位
);
reg [3:0] sec0_R ; // 秒的个位
reg [3:0] sec1_R ; // 秒的十位
assign sec0 = sec0_R;
assign sec1 = sec1_R;
reg [23:0] counter; // 用于12百万周期的24位计数器
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
counter <= 0;
sec0_R <= 0;sec1_R <= 0;
end else if (counter == CNT_1s_MAX - 1) begin
counter <= 0; // 每秒重置计数器
if (sec0_R == 9) begin
if(sec1_R == 1)begin
sec0_R <= 0;sec1_R <= 0;
end else begin
sec1_R <= sec1_R + 1; // 递减倒计时器
sec0_R <= 0;
end
end else begin
sec0_R <= sec0_R + 1; // 递减倒计时器
end
end else begin
counter <= counter + 1; // 递增计数器
end
end
endmodule
seg_ctrl.v
核心功能是 传感器数据稳定性检测与数码管显示使能控制,具体实现以下两点:
传感器数据滤波:对输入的接近传感器数据 prox_dat 进行 两级缓存 + 差值校验,输出稳定的 prox_dat2。防止传感器噪声或突变值导致显示抖动。
数码管显示使能控制:当稳定后的传感器值 prox_dat2 超过阈值(≥30)时,使能数码管显示 (seg_en=1),否则关闭显示 (seg_en=0)。当 seg_en=1 时,数码管显示计时(来自 create_data.v)和传感器数值(来自 prox_dat2)。当 seg_en=0 时,数码管可能关闭或显示待机信息。
module seg_ctrl(
input wire clk,
input rst_n,
input [15:0] prox_dat ,
input dat_valid ,
output reg seg_en
);
//第1段:解析出稳定的prox_dat2
reg [15:0] prox_dat0,prox_dat1,prox_dat2;
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
prox_dat0 <= 16'd0;
prox_dat1 <= 16'd0;
prox_dat2 <= 16'd0;
end
else if(dat_valid) begin
prox_dat0 <= prox_dat;
prox_dat1 <= prox_dat0;
if(((prox_dat1-prox_dat0) >= 16'h800)||((prox_dat1-prox_dat0) >= 16'h800))
prox_dat2 <= prox_dat2;
else
prox_dat2 <= prox_dat0;
end
else begin
prox_dat0 <= prox_dat0;
prox_dat1 <= prox_dat1;
prox_dat2 <= prox_dat2;
end
end
//第2段数码管使能
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
seg_en <= 1'b0;
else if(prox_dat2 >= 30)
seg_en <= 1'b1;
else
seg_en <= 1'b0;
end
endmodule
beeper_ctrl.v
核心功能是 动态音调报警控制,具体实现以下两点:
多模式报警:
模式一(短时报警):当接近传感器触发时,蜂鸣器以固定频率鸣响 2秒(由 cnt_2s 控制)。
模式二(动态音调):当传感器数值持续超过阈值时,蜂鸣器音调随距离变化(越近音调越高)。
传感器数据滤波与阈值判断:
复用 seg_ctrl.v 的滤波逻辑(三级缓存 + 差值校验),输出稳定的 prox_dat2。
根据 prox_dat2 与阈值 ThreHold 的关系,切换报警模式和音调频率。
module beeper_ctrl
(
input clk ,
input rst_n ,
input beeper_en ,
output wire beeper ,
input [15:0] prox_dat ,
input dat_valid
);
//声调
parameter L1 = 16'd45872 ; //L1,
parameter L2 = 16'd40858 ; //L2,
parameter L3 = 16'd36408 ; //L3,
parameter L4 = 16'd34364 ; //L4,
parameter L5 = 16'd30612 ; //L5,
parameter L6 = 16'd27273 ; //L6,
parameter L7 = 16'd24296 ; //L7,
parameter M1 = 16'd22931 ; //M1,
parameter M2 = 16'd20432 ; //M2,
parameter M3 = 16'd18201 ; //M3,
parameter M4 = 16'd17180 ; //M4,
parameter M5 = 16'd15306 ; //M5,
parameter M6 = 16'd13636 ; //M6,
parameter M7 = 16'd12148 ; //M7,
parameter H1 = 16'd11478 ; //H1,
parameter H2 = 16'd10215 ; //H2,
parameter CNT_1s_MAX = 12_000_000 ; // 12MHz时钟,1秒的周期
parameter ThreHold = 100;
parameter ALARM_PRT = 2_000_000;
reg beeper_R;
assign beeper = beeper_R;
reg [15:0] cnt;
reg [31:0] cnt_2s;
reg [31:0] cnt_alarm;
reg beeper_en2;
reg [15:0] cycle;
//第1段:解析出稳定的prox_dat2
reg [15:0] prox_dat0,prox_dat1,prox_dat2;
always @(posedge clk or negedge rst_n) begin
if(!rst_n)begin
prox_dat0 <= 16'd0;
prox_dat1 <= 16'd0;
prox_dat2 <= 16'd0;
end
else if(dat_valid) begin
prox_dat0 <= prox_dat;
prox_dat1 <= prox_dat0;
if(((prox_dat1-prox_dat0) >= 16'h800)||((prox_dat1-prox_dat0) >= 16'h800))
prox_dat2 <= prox_dat2;
else
prox_dat2 <= prox_dat0;
end
else begin
prox_dat0 <= prox_dat0;
prox_dat1 <= prox_dat1;
prox_dat2 <= prox_dat2;
end
end
//第2段-1:音调节奏计数
always @(posedge clk or negedge rst_n)
if(!rst_n)
cnt <= 1'b1;
else if(cnt >= cycle)
cnt <= 1'b1;
else
cnt <= cnt + 1'b1;
//第2段-2:警报器使能计数
always @(posedge clk or negedge rst_n)
if(!rst_n)
cnt_alarm <= 1'b1;
else if(prox_dat2 > ThreHold)
if(cnt_alarm >= ALARM_PRT)
cnt_alarm <= 1;
else
cnt_alarm <= cnt_alarm + 1'b1;
else
cnt_alarm <= 1;
//第3段:beeper_R寄存器开始震动,代表音调
always@(posedge clk or negedge rst_n)
if(!rst_n)
beeper_R <= 1'b1;
else if(beeper_en || beeper_en2)
if(cnt < cycle >>1)
beeper_R <= 1'b1;
else
beeper_R <= 1'b0;
else
beeper_R <= 1'b1;
// 第5段:模式一下蜂鸣器每次只响2s,因此对其进行计数
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
cnt_2s <= 32'd0;
else if(beeper_en)
cnt_2s <= cnt_2s + 1'b1;
else
cnt_2s <= 32'd0;
end
//第7段:模式二:有人接近时
//随着人接近的距离,音调逐渐变高
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
beeper_en2 <= 1'b0;
else
if(prox_dat2 >= ThreHold)
if(cnt_alarm == ALARM_PRT)
beeper_en2 <= ~beeper_en2;
else
beeper_en2 <= beeper_en2;
else
beeper_en2 <= 1'b0;
end
always@(posedge clk or negedge rst_n) begin
if(!rst_n)begin
cycle <= L3;
end else begin
if(prox_dat2 <= ThreHold) begin cycle <= L3;end //L1,
else begin cycle <= L7;end //L7
end
end
endmodule
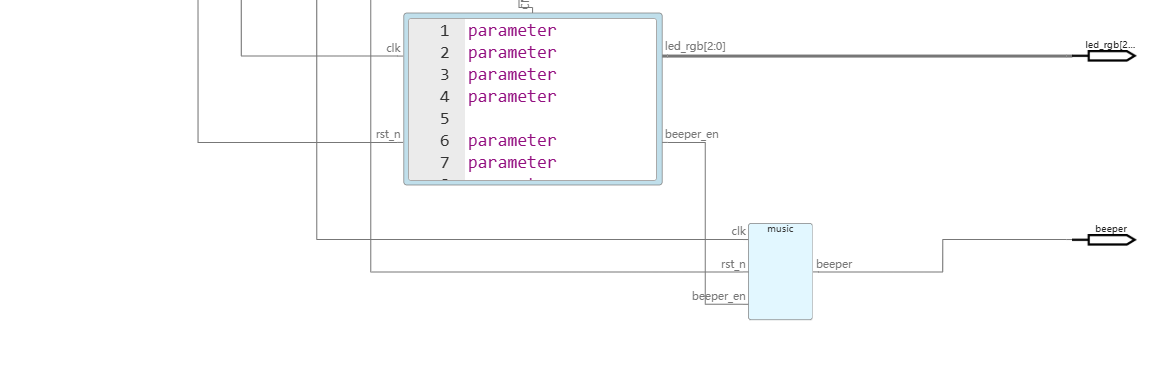
rgb_led_module.v
自主红绿灯倒计时
计时逻辑:
红灯周期:当 sec1 == 1(即10~19秒),RGB灯显示红色。
绿灯周期:当 sec1 == 0 且 sec0 <= 6(即0~6秒),RGB灯显示绿色。
蓝灯周期:当 sec1 == 0 且 sec0 > 6(即7~9秒),RGB灯显示蓝色(可能代表黄灯过渡)。
2. 蜂鸣器提醒
触发条件:在蓝灯周期(7~9秒),蜂鸣器以 0.25秒间隔(4Hz)鸣响,提示倒计时结束。
实现方式:通过 cnt_1_4s 计数器生成周期信号,控制 beeper_en 翻转。
module rgb_led_module #(
parameter CNT_1s_MAX = 12_000_000 // 12MHz时钟,1秒的周期
)
(
input clk, // 12MHz时钟输入
input rst_n, // 低有效复位信号
output [2:0] led_rgb,
output beeper_en
);
parameter SEC0_START = 0;
parameter SEC1_START = 0;
parameter SEC0_END = 5;
parameter SEC1_END = 2;
parameter SEC0_RED = 5;
parameter SEC1_RED = 1;
parameter SEC0_YELLOW = 3;
parameter SEC1_YELLOW = 1;
wire [3:0] sec0 ; // 秒的个位
wire [3:0] sec1 ; // 秒的十位
reg [3:0] sec0_R ; // 秒的个位
reg [3:0] sec1_R ; // 秒的十位
reg [2:0] led_rgb_R ; // 红灯011,绿灯101
reg beeper_en_R ;
reg [31:0] cnt_1_4s ;
assign sec0 = sec0_R;
assign sec1 = sec1_R;
assign led_rgb = led_rgb_R;
assign beeper_en = beeper_en_R;
reg [23:0] counter; // 用于12百万周期的24位计数器
localparam RED_COLOR = 3'b011;
localparam GREEN_COLOR = 3'b101;
localparam BLUE_COLOR = 3'b110;
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
counter <= 0;
sec0_R <= SEC0_START;sec1_R <= 0;
end else if (counter == CNT_1s_MAX - 1) begin
counter <= 0; // 每秒重置计数器
if (sec0_R == 9) begin
if(sec1_R == 1)begin
sec0_R <= 0;sec1_R <= 0;
end else begin
sec1_R <= sec1_R + 1; // 递减倒计时器
sec0_R <= 0;
end
end else begin
sec0_R <= sec0_R + 1; // 递减倒计时器
end
end else begin
counter <= counter + 1; // 递增计数器
end
end
always@(posedge clk or negedge rst_n)
if(!rst_n)
led_rgb_R <= GREEN_COLOR;
else if(sec1 == 1)
led_rgb_R <= RED_COLOR;
else if(sec0 > 6)
led_rgb_R <= BLUE_COLOR;
else
led_rgb_R <= GREEN_COLOR;
always@(posedge clk or negedge rst_n)
if(!rst_n)
beeper_en_R <= 0;
else if(sec1 == 1)
beeper_en_R <= 0;
else if(sec0 > 6)
if(cnt_1_4s == CNT_1s_MAX >> 2)
beeper_en_R <= ~beeper_en_R;
else
beeper_en_R <= beeper_en_R;
else
beeper_en_R <= 0;
always@(posedge clk or negedge rst_n)
if(!rst_n)
cnt_1_4s <= 0;
else if(sec0 > 6 && sec1 == 0)
if(cnt_1_4s == CNT_1s_MAX >> 2)
cnt_1_4s <= 0;
else
cnt_1_4s <= cnt_1_4s + 1'b1;
else
cnt_1_4s <= 0;
endmodule
TOP.v
top.v 是系统的 核心整合模块,负责协调传感器数据采集、报警控制、RGB/LED显示、数码管驱动等子模块的交互。:
- 传感器数据流
传感器驱动 (rpr0521rs_driver):
输出 prox_dat(接近传感器原始数据)、ch0_dat(环境光数据)、dat_valid(数据有效标志)。
数据流向:
prox_dat → seg_ctrl(滤波) → seg_en(显示使能)。
prox_dat → beeper_ctrl(报警控制)。
ch0_dat → decoder(环境光数据处理)→ lux_data → 数码管显示。
2. 报警与显示联动
蜂鸣器控制 (beeper_ctrl):
输入 prox_dat 和 beeper_en(来自 rgb_led_module)。
问题:rgb_led_module 的 beeper_en 当前基于自主倒计时生成,而非传感器触发,导致报警逻辑错乱。
数码管使能 (seg_ctrl):
当 prox_dat2 ≥ 30 时,seg_en=1,触发数码管显示。
3. 计时与显示
计时模块 (create_data):
输出 sec0(秒个位)和 sec1(秒十位)。
问题:复位信号错误连接到 seg_en,导致计时器在显示使能时被复位。
数码管显示 (segment_scan):
显示 prox_data_bcd(接近传感器数值)和 lux_data(环境光强度)。
module top(
input clk ,
input rst_n ,
output [8:0] seg_led_1 , //在小脚丫上控制一个数码管需要9个信号 MSB~LSB=DIG、DP、G、F、E、D、C、B、A
output [8:0] seg_led_2 , //在小脚丫上第二个数码管的控制信号 MSB~LSB=DIG、DP、G、F、E、D、C、B、A
output [7:0] led , //led灯
output [2:0] led_rgb ,
output [2:0] led_rgb2 ,
output beeper ,
output i2c_scl , //I2C时钟总线
inout i2c_sda , //I2C数据总线
output seg_rck , // 74HC595的RCK管脚
output seg_sck , // 74HC595的SCK管脚
output seg_din // 74HC595的SER管脚
);
//u1_seg_data_gen
wire [3:0] sec0;
wire [3:0] sec1;
//u2_rgb_led_module
wire beeper_en;
//u3_rpr0521rs_driver
wire dat_valid;
wire [15:0] ch0_dat, ch1_dat, prox_dat;
//u4_seg_ctrl
wire seg_en;
//u6_decoder
wire [31:0] lux_data,prox_data_bcd;
create_data #(
.CNT_1s_MAX (12_000_000) // 12MHz时钟,1秒的周期
)
u1_create_data(
.clk (clk ),
.rst_n (seg_en ),
.sec0 (sec0 ),
.sec1 (sec1 )
);
rgb_led_module #(
.CNT_1s_MAX (12_000_000) // 12MHz时钟,1秒的周期
)
u2_rgb_led_module(
.clk (clk ),
.rst_n (rst_n ),
.led_rgb (led_rgb ),
.beeper_en (beeper_en )
);
beeper_ctrl #(
.L1 (16'd45872 ) , //L1,
.L2 (16'd40858 ) , //L2,
.L3 (16'd36408 ) , //L3,
.L4 (16'd34364 ) , //L4,
.L5 (16'd30612 ) , //L5,
.L6 (16'd27273 ) , //L6,
.L7 (16'd24296 ) , //L7,
.M1 (16'd22931 ) , //M1,
.M2 (16'd20432 ) , //M2,
.M3 (16'd18201 ) , //M3,
.M4 (16'd17180 ) , //M4,
.M5 (16'd15306 ) , //M5,
.M6 (16'd13636 ) , //M6,
.M7 (16'd12148 ) , //M7,
.H1 (16'd11478 ) , //H1,
.H2 (16'd10215 ) , //H2,
.ALARM_PRT (200 )
)
u2_beeper_ctrl
(
.clk (clk ),
.rst_n (rst_n ),
.beeper_en (beeper_en ),
.beeper (beeper ),
.prox_dat (prox_dat ),
.dat_valid (dat_valid )
);
rpr0521rs_driver u3_rpr0521rs_driver(
.clk (clk ), //系统时钟
.rst_n (rst_n ), //系统复位,低有效
.i2c_scl (i2c_scl ), //I2C总线SCL
.i2c_sda (i2c_sda ), //I2C总线SDA
.dat_valid (dat_valid ), //数据有效脉冲
.ch0_dat (ch0_dat ), //ALS数据
.ch1_dat (ch1_dat ), //IR数据
.prox_dat (prox_dat ) //Prox数据
);
////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////
//仿真
// module TOP(
// input clk ,
// input rst_n ,
// output [8:0] seg_led_1 , //在小脚丫上控制一个数码管需要9个信号 MSB~LSB=DIG、DP、G、F、E、D、C、B、A
// output [8:0] seg_led_2 , //在小脚丫上第二个数码管的控制信号 MSB~LSB=DIG、DP、G、F、E、D、C、B、A
// output [7:0] led , //led灯
// output [2:0] led_rgb ,
// output [2:0] led_rgb2 ,
// output beeper ,
// output i2c_scl , //I2C时钟总线
// inout i2c_sda , //I2C数据总线
// output seg_rck , // 74HC595的RCK管脚
// output seg_sck , // 74HC595的SCK管脚
// output seg_din , // 74HC595的SER管脚
// input dat_valid ,
// input [15:0] ch0_dat ,
// input [15:0] ch1_dat ,
// input [15:0] prox_dat
// );
// //u1_create_data
// wire [3:0] sec0;
// wire [3:0] sec1;
// //u2_rgb_led_module
// wire beeper_en;
// //u4_seg_ctrl
// wire seg_en;
// //u6_decoder
// wire [31:0] lux_data,prox_data_bcd;
// create_data #(
// .CNT_1s_MAX (12_0) // 12MHz时钟,1秒的周期
// )
// u1_create_data(
// .clk (clk ),
// .rst_n (seg_en ),
// .sec0 (sec0 ),
// .sec1 (sec1 )
// );
// rgb_led_module #(
// .CNT_1s_MAX (12_0) // 12MHz时钟,1秒的周期
// )
// u2_rgb_led_module(
// .clk (clk ),
// .rst_n (rst_n ),
// .led_rgb (led_rgb ),
// .beeper_en (beeper_en )
// );
// beeper_ctrl #(
// .L1 (16'd45 ) , //L1,
// .L2 (16'd40 ) , //L2,
// .L3 (16'd36 ) , //L3,
// .L4 (16'd34 ) , //L4,
// .L5 (16'd30 ) , //L5,
// .L6 (16'd27 ) , //L6,
// .L7 (16'd24 ) , //L7,
// .M1 (16'd22 ) , //M1,
// .M2 (16'd20 ) , //M2,
// .M3 (16'd18 ) , //M3,
// .M4 (16'd17 ) , //M4,
// .M5 (16'd15 ) , //M5,
// .M6 (16'd13 ) , //M6,
// .M7 (16'd12 ) , //M7,
// .H1 (16'd11 ) , //H1,
// .H2 (16'd10 ) , //H2,
// .ALARM_PRT (200 )
// )
// u3_beeper_ctrl
// (
// .clk (clk ),
// .rst_n (rst_n ),
// .beeper_en (beeper_en ),
// .beeper (beeper ),
// .prox_dat (prox_dat ),
// .dat_valid (dat_valid )
// );
////////////////////////////////////////////////////////////////////
seg_ctrl u4_seg_ctrl(
.clk (clk ),
.rst_n (rst_n ),
.prox_dat (prox_dat ),
.dat_valid (dat_valid ),
.seg_en (seg_en )
);
segment u5_segment(
.seg_data_1 (sec1 ),
.seg_data_2 (sec0 ),
.seg_led_1 (seg_led_1 ),
.seg_led_2 (seg_led_2 )
);
decoder u6_decoder(
.clk (clk ),
.rst_n (rst_n ),
.dat_valid (dat_valid ),
.ch0_dat (ch0_dat ),
.ch1_dat (ch1_dat ),
.prox_dat (prox_dat ),
.lux_data (lux_data ),
.Y_out (led ),
.prox_data_bcd (prox_data_bcd )
);
segment_scan u7_segment_scan(
.clk (clk ), //系统时钟 12mhz
.rst_n (rst_n ), //系统复位 低有效
.dat_1 (prox_data_bcd[15:12] ), //seg1 显示的数据输入
.dat_2 (prox_data_bcd[11: 8] ), //seg2 显示的数据输入
.dat_3 (prox_data_bcd[ 7: 4] ), //seg3 显示的数据输入
.dat_4 (prox_data_bcd[ 3: 0] ), //seg4 显示的数据输入
// .dat_5 (lux_data[23:20] ), //seg5 显示的数据输入
// .dat_6 (lux_data[19:16] ), //seg6 显示的数据输入
// .dat_7 (lux_data[15:12] ), //seg7 显示的数据输入
// .dat_8 (lux_data[11:08] ), //seg8 显示的数据输入
.dat_5 (lux_data[27:24] ), //seg5 显示的数据输入
.dat_6 (lux_data[23:20] ), //seg6 显示的数据输入
.dat_7 (lux_data[19:16] ), //seg7 显示的数据输入
.dat_8 (lux_data[15:12] ), //seg8 显示的数据输入
.dat_en (8'b1111_1111 ), //数码管数据位显示使能,[msb~lsb]=[seg1~seg8]
.dot_en (8'b0001_0000 ), //数码管小数点位显示使能,[msb~lsb]=[seg1~seg8]
.seg_rck (seg_rck ), //74hc595的rck管脚
.seg_sck (seg_sck ), //74hc595的sck管脚
.seg_din (seg_din ) //74hc595的ser管脚
);
assign led_rgb2 = seg_en ? 3'b000 : 3'b111;
endmodule
实验效果图和叙述
首先是核心板上的RGB1用来实现基础的交通灯控制系统,但是在后续中,我将核心板上的数码管进行了修改,改为在人员靠近或者环境光降低时间的计时,而后是RGB2也是在相同情形下进行光的亮,并且在越靠近传感器或者环境光越低的情况下,蜂鸣器报警的音调越高,且呈现2s间断,并且随着光亮越低,核心板的8位led小红灯将呈现流水灯的形式,最后是底板上的八位数码管会显示出传感器的数值,越靠近传感器数值越大。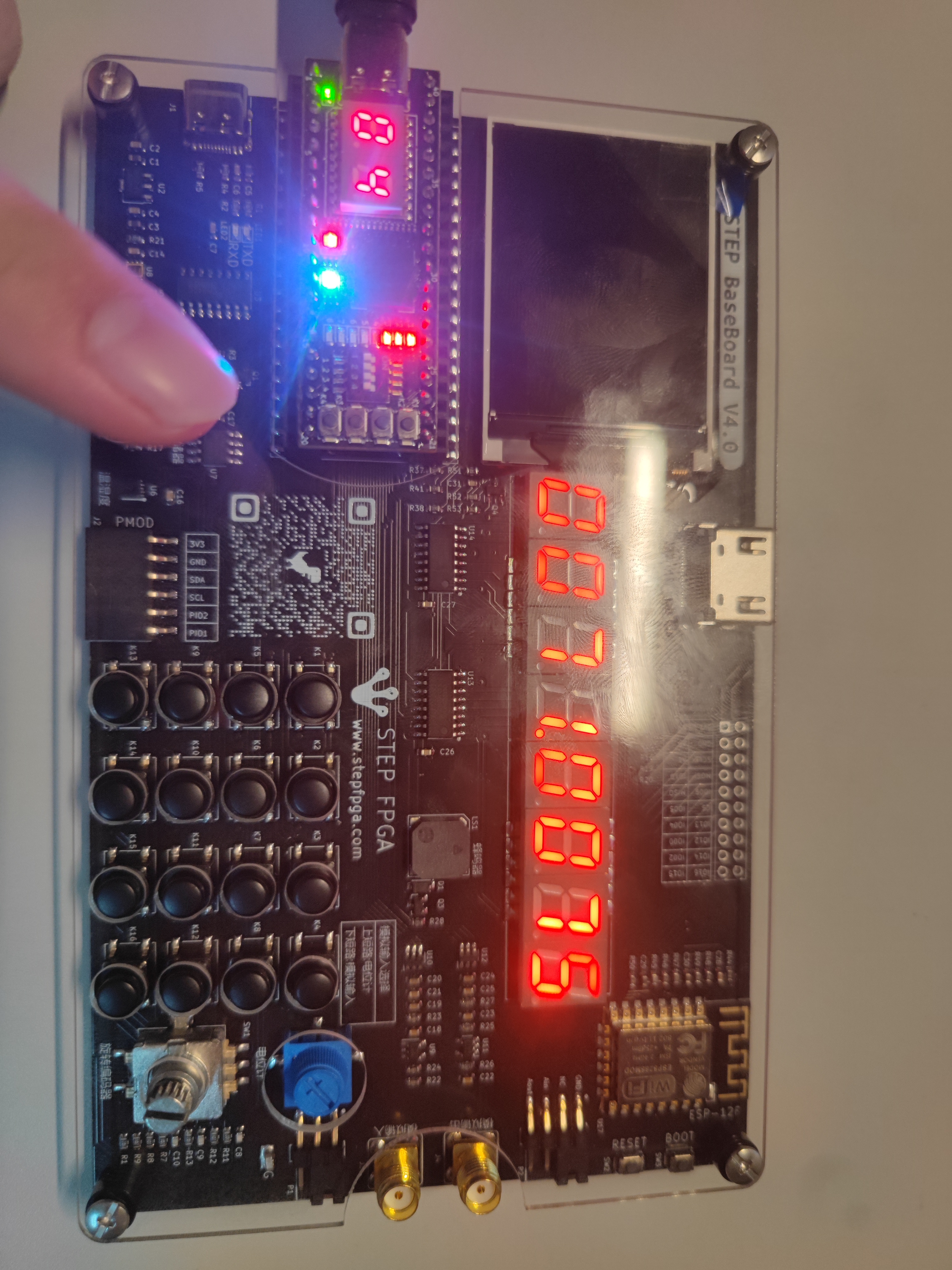
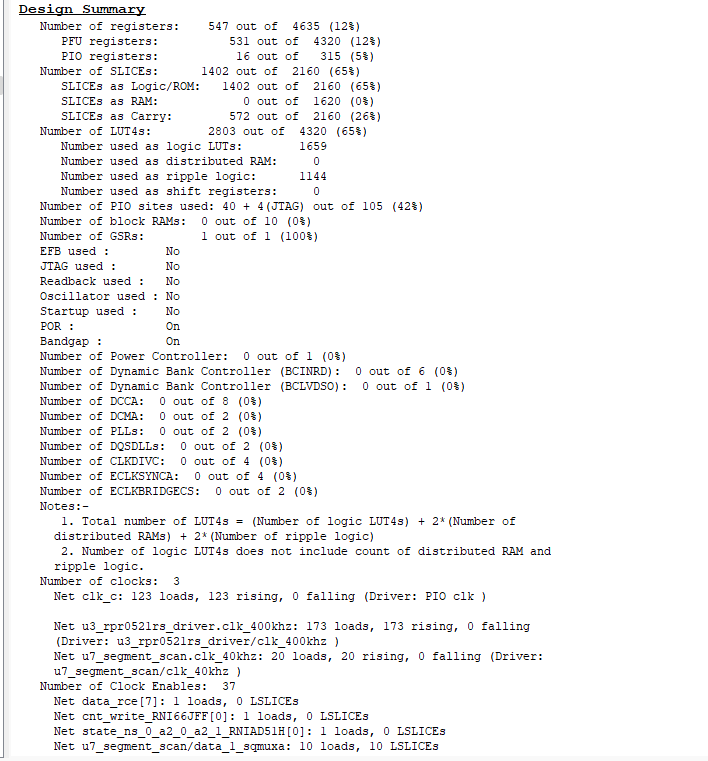
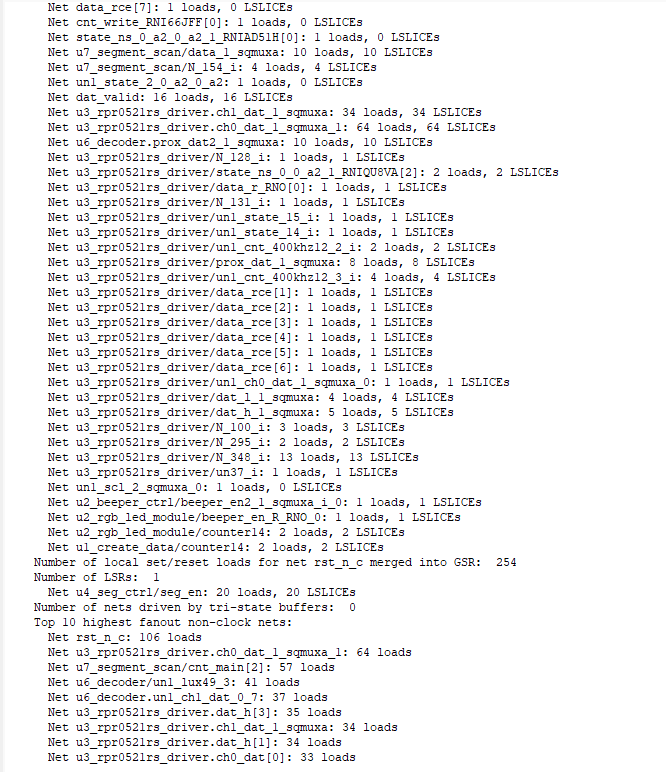
FPGA资源占用
遇到的问题和解决方案
-多模块异步操作 + 硬件资源竞争
同步化 → 滤波 →分时复用
对本次活动的心得体会
学习到了FPGA的相关知识。板子功能完善,就是WebIDE不太好用。

