任务介绍
本项目实现了硬禾科技2025寒假练CrowPanel HMI开发板的任务1,基于CrowPanel ESP32 Display 4.3英寸HMI开发板,构建了端到端的手写数字识别系统。系统通过触摸屏采集手写输入,经ESP32进行实时图像处理与机器学习推理,最终将识别结果同步至8x8 LED矩阵显示。
硬件平台
首先介绍本次用到的开发板:CrowPanel ESP32 Display,它的核心是ESP32 S3双核微控制器,因为是一块面向HMI开发的触摸屏开发板。因此它的主体就是一块4.3寸的LCD屏,板卡集成了如扩展GPIO、串口、TF卡槽、USB接口、喇叭以及电池接口等比较丰富的外设接口,在软件方面,官方已经适配好了Arduino IDE、Espressif IDF、PlatformIO和MicroPython多种开发平台,上手开发会很方便。本次我会使用这块CrowPanel开发板,做一个基于ESP32的手写数字识别系统。
- 主控设备:CrowPanel ESP32 Display开发板
- 搭载双核Xtensa® 32位LX6微处理器
- 集成WiFi/蓝牙无线通信模块
- 480x272分辨率RGB显示屏
- 电阻式触摸屏交互界面
- 显示模块:
- 8x8 LED矩阵(74HC595驱动)
- 级联移位寄存器控制
- 动态扫描刷新率>200Hz
任务分析与实现
这次主办方出了三种任务,
- 任务一是手写识别显示,在屏幕上手写数字,识别结果并在灯板上显示;
- 任务二是音频信号播放及分析,电脑上采集音频,发送给开发板进行波形显示与信号分析;
- 任务三是自由命题。
本次项目实现了任务一。
方案框图:
%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2281%22%20x%3D%22202.3333%22%20y%3D%22225.4653%22%3E3.%20%26%2321160%3B%26%2324577%3B%26%2320108%3B%26%2320540%3B%26%2321270%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2281%22%20x%3D%22202.3333%22%20y%3D%22240.5981%22%3E4.%20%26%2324418%3B%26%2324577%3B%26%2323398%3B%26%2333192%3B%26%2332960%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_GMN29%22%3E%3Cpath%20d%3D%22M953.3333%2C309%20L953.3333%2C394.6641%20L1109.3333%2C394.6641%20L1109.3333%2C319%20L1099.3333%2C309%20L953.3333%2C309%20%22%20fill%3D%22%23FEFFDD%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A0.5%3B%22%2F%3E%3Cpath%20d%3D%22M1099.3333%2C309%20L1099.3333%2C319%20L1109.3333%2C319%20L1099.3333%2C309%20%22%20fill%3D%22%23FEFFDD%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20font-weight%3D%22bold%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2270%22%20x%3D%22959.3333%22%20y%3D%22326.0669%22%3E%26%2327169%3B%26%2322411%3B%26%2321442%3B%26%2325968%3B%26%2365306%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22135%22%20x%3D%22959.3333%22%20y%3D%22341.1997%22%3ETensorFlow%20Lite%20Micro%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2292%22%20x%3D%22959.3333%22%20y%3D%22356.3325%22%3E98.2%25%26%2327979%3B%26%2335797%3B%26%2331934%3B%26%2324230%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2285%22%20x%3D%22959.3333%22%20y%3D%22371.4653%22%3E48KB%26%2327169%3B%26%2322411%3B%26%2320307%3B%26%2331215%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2288%22%20x%3D%22959.3333%22%20y%3D%22386.5981%22%3E15ms%26%2325512%3B%26%2329702%3B%26%2326102%3B%26%2324310%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22elem_GMN32%22%3E%3Cpath%20d%3D%22M196.8333%2C455%20L196.8333%2C540.6641%20L297.8333%2C540.6641%20L297.8333%2C465%20L287.8333%2C455%20L196.8333%2C455%20%22%20fill%3D%22%23FEFFDD%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A0.5%3B%22%2F%3E%3Cpath%20d%3D%22M287.8333%2C455%20L287.8333%2C465%20L297.8333%2C465%20L287.8333%2C455%20%22%20fill%3D%22%23FEFFDD%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20font-weight%3D%22bold%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2270%22%20x%3D%22202.8333%22%20y%3D%22472.0669%22%3E%26%2339537%3B%26%2321160%3B%26%2329305%3B%26%2324615%3B%26%2365306%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2280%22%20x%3D%22202.8333%22%20y%3D%22487.1997%22%3E200Hz%26%2321047%3B%26%2326032%3B%26%2329575%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2273%22%20x%3D%22202.8333%22%20y%3D%22502.3325%22%3E8%26%2332423%3B%26%2320142%3B%26%2324230%3B%26%2335843%3B%26%2333410%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2280%22%20x%3D%22202.8333%22%20y%3D%22517.4653%22%3E1ms%26%2328040%3B%26%2338544%3B%26%2322788%3B%26%2329702%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2276%22%20x%3D%22202.8333%22%20y%3D%22532.5981%22%3E%26%2332423%3B%26%2332852%3B595%26%2325511%3B%26%2321046%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_touch_driver_touchscreen%22%3E%3Cpath%20d%3D%22M170.5313%2C80%20C188.5173%2C80%20202.1463%2C80%20220.1333%2C80%20%22%20fill%3D%22none%22%20id%3D%22touch_driver-backto-touchscreen%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22164.5313%2C80%2C173.5313%2C84%2C169.5313%2C80%2C173.5313%2C76%2C164.5313%2C80%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2243%22%20x%3D%22170.8323%22%20y%3D%2293.0669%22%3EI%26%23178%3BC%26%2320449%3B%26%2321495%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_touch_driver_preprocess%22%3E%3Cpath%20d%3D%22M104.3333%2C103.11%20C104.3333%2C125.703%20104.3333%2C153.922%20104.3333%2C176.609%20%22%20fill%3D%22none%22%20id%3D%22touch_driver-to-preprocess%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22104.3333%2C182.609%2C108.3333%2C173.609%2C104.3333%2C177.609%2C100.3333%2C173.609%2C104.3333%2C182.609%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2252%22%20x%3D%2251.3333%22%20y%3D%22138.9269%22%3E%26%2322352%3B%26%2326631%3B%26%2324207%3B%26%2321015%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_preprocess_mnist%22%3E%3Cpath%20d%3D%22M86%2C229.134%20C86%2C256.472%2086%2C295.683%2086%2C322.974%20%22%20fill%3D%22none%22%20id%3D%22preprocess-to-mnist%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%2286%2C328.974%2C90%2C319.974%2C86%2C323.974%2C82%2C319.974%2C86%2C328.974%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2278%22%20x%3D%227%22%20y%3D%22275.1209%22%3E28x28%26%2328784%3B%26%2324230%3B%26%2322270%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_mnist_led_ctrl%22%3E%3Cpath%20d%3D%22M107.3333%2C375.134%20C107.3333%2C402.472%20107.3333%2C441.683%20107.3333%2C468.9741%20%22%20fill%3D%22none%22%20id%3D%22mnist-to-led_ctrl%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22107.3333%2C474.9741%2C111.3333%2C465.9741%2C107.3333%2C469.9741%2C103.3333%2C465.9741%2C107.3333%2C474.9741%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2252%22%20x%3D%2254.3333%22%20y%3D%22406.1209%22%3E%26%2339044%3B%26%2327979%3B%26%2325968%3B%26%2323383%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2231%22%20x%3D%2264.8333%22%20y%3D%22421.2537%22%3E(0-9)%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_mnist_label%22%3E%3Cpath%20d%3D%22M164.1713%2C352%20C215.7423%2C352%20278.6073%2C352%20324.1583%2C352%20%22%20fill%3D%22none%22%20id%3D%22mnist-to-label%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22330.1583%2C352%2C321.1583%2C348%2C325.1583%2C352%2C321.1583%2C356%2C330.1583%2C352%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2239%22%20x%3D%22207.1643%22%20y%3D%22348.0669%22%3E%26%2332622%3B%26%2320449%3B%26%2324230%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_predict_btn_mnist%22%3E%3Cpath%20d%3D%22M767.3333%2C375.277%20C767.3333%2C380.738%20767.3333%2C385%20767.3333%2C385%20C767.3333%2C385%2089.1666%2C385%2089.1666%2C385%20C89.1666%2C385%2089.1666%2C386.738%2089.1666%2C381.277%20%22%20fill%3D%22none%22%20id%3D%22predict_btn-to-mnist%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%2289.1666%2C375.277%2C85.1666%2C384.277%2C89.1666%2C380.277%2C93.1666%2C384.277%2C89.1666%2C375.277%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2252%22%20x%3D%22375.2503%22%20y%3D%22398.0669%22%3E%26%2335302%3B%26%2321457%3B%26%2325512%3B%26%2329702%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_clear_btn_canvas%22%3E%3Cpath%20d%3D%22M698.8333%2C375.134%20C698.8333%2C402.472%20698.8333%2C441.683%20698.8333%2C468.9741%20%22%20fill%3D%22none%22%20id%3D%22clear_btn-to-canvas%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22698.8333%2C474.9741%2C702.8333%2C465.9741%2C698.8333%2C469.9741%2C694.8333%2C465.9741%2C698.8333%2C474.9741%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2252%22%20x%3D%22645.8333%22%20y%3D%22421.1209%22%3E%26%2328165%3B%26%2338500%3B%26%2325351%3B%26%2320196%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_clear_btn_led_ctrl%22%3E%3Cpath%20d%3D%22M650.8333%2C375.123%20C650.8333%2C378.024%20650.8333%2C380%20650.8333%2C380%20C650.8333%2C380%20125.5003%2C380%20125.5003%2C380%20C125.5003%2C380%20125.5003%2C434.628%20125.5003%2C468.9683%20%22%20fill%3D%22none%22%20id%3D%22clear_btn-to-led_ctrl%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22125.5003%2C474.9683%2C129.5003%2C465.9683%2C125.5003%2C469.9683%2C121.5003%2C465.9683%2C125.5003%2C474.9683%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2252%22%20x%3D%22290.1213%22%20y%3D%22393.0669%22%3E%26%2322797%3B%26%2320301%3B%26%2325351%3B%26%2320196%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_led_ctrl_led%22%3E%3Cpath%20d%3D%22M143.6663%2C474.9023%20C143.6663%2C453.5156%20143.6663%2C425%20143.6663%2C425%20C143.6663%2C425%20502.6663%2C425%20502.6663%2C425%20C502.6663%2C425%20502.6663%2C402.484%20502.6663%2C381.098%20%22%20fill%3D%22none%22%20id%3D%22led_ctrl-to-led%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22502.6663%2C375.098%2C498.6663%2C384.098%2C502.6663%2C380.098%2C506.6663%2C384.098%2C502.6663%2C375.098%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2276%22%20x%3D%22246.1663%22%20y%3D%22421.0669%22%3E595%26%2320018%3B%26%2334892%3B%26%2325968%3B%26%2325454%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_canvas_preprocess%22%3E%3Cpath%20d%3D%22M733.8333%2C474.9653%20C733.8333%2C426.62%20733.8333%2C319%20733.8333%2C319%20C733.8333%2C319%20122.6663%2C319%20122.6663%2C319%20C122.6663%2C319%20122.6663%2C268.2%20122.6663%2C235.14%20%22%20fill%3D%22none%22%20id%3D%22canvas-to-preprocess%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22122.6663%2C229.14%2C118.6663%2C238.14%2C122.6663%2C234.14%2C126.6663%2C238.14%2C122.6663%2C229.14%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2213%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2252%22%20x%3D%22408.3023%22%20y%3D%22315.0669%22%3E%26%2321407%3B%26%2322987%3B%26%2320301%3B%26%2322270%3B%3C%2Ftext%3E%3C%2Fg%3E%3Cg%20id%3D%22link_mnist_GMN29%22%3E%3Cpath%20d%3D%22M71%2C375.417%20C71%2C383.237%2071%2C390%2071%2C390%20C71%2C390%20724.1623%2C390%20953.1523%2C390%20%22%20fill%3D%22none%22%20id%3D%22mnist-GMN29%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3Bstroke-dasharray%3A7.0%2C7.0%3B%22%2F%3E%3C%2Fg%3E%3Cg%20id%3D%22link_led_GMN32%22%3E%3Cpath%20d%3D%22M544.0003%2C375.14%20C544.0003%2C408.2%20544.0003%2C465%20544.0003%2C465%20C544.0003%2C465%20382.7263%2C465%20297.9953%2C465%20%22%20fill%3D%22none%22%20id%3D%22led-GMN32%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3Bstroke-dasharray%3A7.0%2C7.0%3B%22%2F%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fsvg%3E)
一、手写输入模块
- 触摸采集层
- 创建256x256像素LVGL画布
- 实时捕获触摸坐标(采样率60Hz)
- 平滑轨迹算法:贝塞尔曲线插值
- 图像预处理
- 双线性降采样至28x28像素
- 灰度化处理
- 二值化阈值:0.15(0-255范围)
二、数字识别模块
- 模型推理
- 集成TinyMaix机器学习推理框架
- MNIST CNN量化模型(模型尺寸48KB)
- 推理耗时:<15ms @ 240MHz
- 结果反馈
技术亮点
- 双屏同步控制:
- 触摸屏与LED矩阵内容同步控制
- 高效图像处理:
- 灰度化、自适应ROI裁剪(减少无效计算)
- 多任务架构:
- FreeRTOS任务划分:
- GUI刷新(核心0)
- 模型推理(核心1)
代码详解
下位机整体软件流程图:
%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%2278%22%20x%3D%2254.5%22%20y%3D%22830.5269%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2258%22%20x%3D%2264.5%22%20y%3D%22853.522%22%3E%26%2321608%3B%26%2326399%3B5ms%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%2290%22%20x%3D%22292%22%20y%3D%22244.8906%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2270%22%20x%3D%22302%22%20y%3D%22267.8857%22%3E%26%2320027%3B%26%2324490%3B%26%2329615%3B%26%2324320%3B%26%2322987%3B%3C%2Ftext%3E%3Cpolygon%20fill%3D%22%23F5F5F5%22%20points%3D%22291.5%2C356.8979%2C382.5%2C356.8979%2C394.5%2C368.8979%2C382.5%2C380.8979%2C291.5%2C380.8979%2C279.5%2C368.8979%2C291.5%2C356.8979%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2291%22%20x%3D%22291.5%22%20y%3D%22373.7446%22%3E%26%2322312%3B%26%2330011%3B%26%2324067%3B%26%2321306%3B%26%2322495%3B%26%2320869%3B%3F%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2211%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2220%22%20x%3D%22259.5%22%20y%3D%22366.3037%22%3Eyes%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2211%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2214%22%20x%3D%22394.5%22%20y%3D%22366.3037%22%3Eno%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22104%22%20x%3D%22217.5%22%20y%3D%22390.8979%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2284%22%20x%3D%22227.5%22%20y%3D%22413.8931%22%3E%26%2335760%3B%26%2324405%3B%26%2335302%3B%26%2325720%3B%26%2322352%3B%26%2326631%3B%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22118%22%20x%3D%22210.5%22%20y%3D%22447.1948%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2298%22%20x%3D%22220.5%22%20y%3D%22470.1899%22%3E%26%2332472%3B%26%2321046%3B%26%2336712%3B%26%2336857%3B%26%2321040%3B%26%2330011%3B%26%2324067%3B%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22104%22%20x%3D%22352.5%22%20y%3D%22390.8979%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2284%22%20x%3D%22362.5%22%20y%3D%22413.8931%22%3E%26%2337325%3B%26%2332622%3B%26%2332472%3B%26%2321046%3B%26%2329366%3B%26%2324577%3B%3C%2Ftext%3E%3Cpolygon%20fill%3D%22%23F5F5F5%22%20points%3D%22337%2C489.4917%2C349%2C501.4917%2C337%2C513.4917%2C325%2C501.4917%2C337%2C489.4917%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%2F%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2252.5938%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22173%22%20x%3D%22250.5%22%20y%3D%22581.894%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2298%22%20x%3D%22260.5%22%20y%3D%22604.8892%22%3E%26%2325191%3B%26%2334892%3B%26%2322270%3B%26%2320687%3B%26%2339044%3B%26%2322788%3B%26%2329702%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22153%22%20x%3D%22260.5%22%20y%3D%22621.186%22%3E(downsample_canvas)%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2252.5938%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22162%22%20x%3D%22256%22%20y%3D%22654.4878%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22142%22%20x%3D%22266%22%20y%3D%22677.4829%22%3E%26%2335843%3B%26%2329992%3BTinyMaix%26%2325512%3B%26%2329702%3B%26%2324341%3B%26%2325806%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2282%22%20x%3D%22266%22%20y%3D%22693.7798%22%3E(test_mnist)%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22104%22%20x%3D%22285%22%20y%3D%22727.0815%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2284%22%20x%3D%22295%22%20y%3D%22750.0767%22%3E%26%2326356%3B%26%2326032%3B%26%2332467%3B%26%2326524%3B%26%2326631%3B%26%2331614%3B%3C%2Ftext%3E%3Crect%20fill%3D%22%23555555%22%20height%3D%226%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%23555555%3Bstroke-width%3A1.0%3B%22%20width%3D%22159%22%20x%3D%22257.5%22%20y%3D%22798.3784%22%2F%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2252.5938%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22131%22%20x%3D%22271.5%22%20y%3D%22824.3784%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22111%22%20x%3D%22281.5%22%20y%3D%22847.3735%22%3ELED%26%2330697%3B%26%2338453%3B%26%2326174%3B%26%2331034%3B%26%2325968%3B%26%2323383%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2286%22%20x%3D%22281.5%22%20y%3D%22863.6704%22%3E(updateLED)%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22121%22%20x%3D%22276.5%22%20y%3D%22896.9722%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22101%22%20x%3D%22286.5%22%20y%3D%22919.9673%22%3E200Hz%26%2321160%3B%26%2324577%3B%26%2325195%3B%26%2325551%3B%3C%2Ftext%3E%3Crect%20fill%3D%22%23555555%22%20height%3D%226%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%23555555%3Bstroke-width%3A1.0%3B%22%20width%3D%22159%22%20x%3D%22257.5%22%20y%3D%22953.269%22%2F%3E%3Cpolygon%20fill%3D%22%23F5F5F5%22%20points%3D%22291.5%2C533.4917%2C382.5%2C533.4917%2C394.5%2C545.4917%2C382.5%2C557.4917%2C291.5%2C557.4917%2C279.5%2C545.4917%2C291.5%2C533.4917%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2211%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2220%22%20x%3D%22341%22%20y%3D%22567.7021%22%3Eyes%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2291%22%20x%3D%22291.5%22%20y%3D%22550.3384%22%3E%26%2339044%3B%26%2327979%3B%26%2325353%3B%26%2338062%3B%26%2328857%3B%26%2320987%3B%3F%3C%2Ftext%3E%3Cpolygon%20fill%3D%22%23F5F5F5%22%20points%3D%22337%2C979.269%2C349%2C991.269%2C337%2C1003.269%2C325%2C991.269%2C337%2C979.269%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%2F%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22104%22%20x%3D%22285%22%20y%3D%221071.6714%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2284%22%20x%3D%22295%22%20y%3D%221094.6665%22%3E%26%2328165%3B%26%2331354%3B%26%2330011%3B%26%2324067%3B%26%2320687%3B%26%2332032%3B%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22104%22%20x%3D%22285%22%20y%3D%221127.9683%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2284%22%20x%3D%22295%22%20y%3D%221150.9634%22%3E%26%2337325%3B%26%2332622%3B%26%2332467%3B%26%2326524%3B%26%2326631%3B%26%2331614%3B%3C%2Ftext%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2252.5938%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22103%22%20x%3D%22285.5%22%20y%3D%221184.2651%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2283%22%20x%3D%22295.5%22%20y%3D%221207.2603%22%3E%26%2329060%3B%26%2328781%3BLED%26%2330697%3B%26%2338453%3B%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2270%22%20x%3D%22295.5%22%20y%3D%221223.5571%22%3E(clearLED)%3C%2Ftext%3E%3Cpolygon%20fill%3D%22%23F5F5F5%22%20points%3D%22291.5%2C1023.269%2C382.5%2C1023.269%2C394.5%2C1035.269%2C382.5%2C1047.269%2C291.5%2C1047.269%2C279.5%2C1035.269%2C291.5%2C1023.269%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2211%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2220%22%20x%3D%22341%22%20y%3D%221057.4795%22%3Eyes%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2291%22%20x%3D%22291.5%22%20y%3D%221040.1157%22%3E%26%2328165%3B%26%2338500%3B%26%2325353%3B%26%2338062%3B%26%2328857%3B%26%2320987%3B%3F%3C%2Ftext%3E%3Cpolygon%20fill%3D%22%23F5F5F5%22%20points%3D%22337%2C1256.8589%2C349%2C1268.8589%2C337%2C1280.8589%2C325%2C1268.8589%2C337%2C1256.8589%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%2F%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%22138%22%20x%3D%22268%22%20y%3D%221300.8589%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%22118%22%20x%3D%22278%22%20y%3D%221323.854%22%3E%26%2322788%3B%26%2329702%3BLVGL%26%2320107%3B%26%2320214%3B%26%2338431%3B%26%2321015%3B%3C%2Ftext%3E%3Cpolygon%20fill%3D%22%23F5F5F5%22%20points%3D%22305.5%2C301.1875%2C368.5%2C301.1875%2C380.5%2C313.1875%2C368.5%2C325.1875%2C305.5%2C325.1875%2C293.5%2C313.1875%2C305.5%2C301.1875%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22sans-serif%22%20font-size%3D%2211%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2250%22%20x%3D%22341%22%20y%3D%22335.3979%22%3E%26%2335302%3B%26%2325720%3B%26%2320107%3B%26%2320214%3B%3F%3C%2Ftext%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2263%22%20x%3D%22305.5%22%20y%3D%22318.0342%22%3E%26%2336816%3B%26%2334892%3B%26%2329366%3B%26%2324577%3B%3F%3C%2Ftext%3E%3Crect%20fill%3D%22%23555555%22%20height%3D%226%22%20rx%3D%222.5%22%20ry%3D%222.5%22%20style%3D%22stroke%3A%23555555%3Bstroke-width%3A1.0%3B%22%20width%3D%22473.5%22%20x%3D%2211%22%20y%3D%221379.1558%22%2F%3E%3Crect%20fill%3D%22%23F5F5F5%22%20height%3D%2236.2969%22%20rx%3D%2212.5%22%20ry%3D%2212.5%22%20style%3D%22stroke%3A%23333333%3Bstroke-width%3A0.5%3B%22%20width%3D%2276%22%20x%3D%22205%22%20y%3D%221405.1558%22%2F%3E%3Ctext%20fill%3D%22%23000000%22%20font-family%3D%22%26%2324494%3B%26%2336719%3B%26%2338597%3B%26%2340657%3B%22%20font-size%3D%2214%22%20lengthAdjust%3D%22spacing%22%20textLength%3D%2256%22%20x%3D%22215%22%20y%3D%221428.1509%22%3E%26%2331995%3B%26%2332479%3B%26%2320851%3B%26%2338381%3B%3C%2Ftext%3E%3Cellipse%20cx%3D%22243%22%20cy%3D%221472.4526%22%20fill%3D%22none%22%20rx%3D%2211%22%20ry%3D%2211%22%20style%3D%22stroke%3A%23222222%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cellipse%20cx%3D%22243%22%20cy%3D%221472.4526%22%20fill%3D%22%23222222%22%20rx%3D%226%22%20ry%3D%226%22%20style%3D%22stroke%3A%23222222%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22243%22%20x2%3D%22243%22%20y1%3D%2230%22%20y2%3D%2250%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22239%2C40%2C243%2C50%2C247%2C40%2C243%2C44%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22243%22%20x2%3D%22243%22%20y1%3D%2286.2969%22%20y2%3D%22106.2969%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22239%2C96.2969%2C243%2C106.2969%2C247%2C96.2969%2C243%2C100.2969%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22243%22%20x2%3D%22243%22%20y1%3D%22142.5938%22%20y2%3D%22162.5938%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22239%2C152.5938%2C243%2C162.5938%2C247%2C152.5938%2C243%2C156.5938%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%2293.5%22%20x2%3D%2293.5%22%20y1%3D%22795.5269%22%20y2%3D%22830.5269%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%2289.5%2C820.5269%2C93.5%2C830.5269%2C97.5%2C820.5269%2C93.5%2C824.5269%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22269.5%22%20x2%3D%22269.5%22%20y1%3D%22427.1948%22%20y2%3D%22447.1948%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22265.5%2C437.1948%2C269.5%2C447.1948%2C273.5%2C437.1948%2C269.5%2C441.1948%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22279.5%22%20x2%3D%22269.5%22%20y1%3D%22368.8979%22%20y2%3D%22368.8979%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22269.5%22%20x2%3D%22269.5%22%20y1%3D%22368.8979%22%20y2%3D%22390.8979%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22265.5%2C380.8979%2C269.5%2C390.8979%2C273.5%2C380.8979%2C269.5%2C384.8979%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22394.5%22%20x2%3D%22404.5%22%20y1%3D%22368.8979%22%20y2%3D%22368.8979%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22404.5%22%20x2%3D%22404.5%22%20y1%3D%22368.8979%22%20y2%3D%22390.8979%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22400.5%2C380.8979%2C404.5%2C390.8979%2C408.5%2C380.8979%2C404.5%2C384.8979%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22269.5%22%20x2%3D%22269.5%22%20y1%3D%22483.4917%22%20y2%3D%22501.4917%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22269.5%22%20x2%3D%22325%22%20y1%3D%22501.4917%22%20y2%3D%22501.4917%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22315%2C497.4917%2C325%2C501.4917%2C315%2C505.4917%2C319%2C501.4917%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22404.5%22%20x2%3D%22404.5%22%20y1%3D%22427.1948%22%20y2%3D%22501.4917%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22404.5%22%20x2%3D%22349%22%20y1%3D%22501.4917%22%20y2%3D%22501.4917%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22359%2C497.4917%2C349%2C501.4917%2C359%2C505.4917%2C355%2C501.4917%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22634.4878%22%20y2%3D%22654.4878%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C644.4878%2C337%2C654.4878%2C341%2C644.4878%2C337%2C648.4878%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22707.0815%22%20y2%3D%22727.0815%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C717.0815%2C337%2C727.0815%2C341%2C717.0815%2C337%2C721.0815%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22876.9722%22%20y2%3D%22896.9722%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C886.9722%2C337%2C896.9722%2C341%2C886.9722%2C337%2C890.9722%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22804.3784%22%20y2%3D%22824.3784%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C814.3784%2C337%2C824.3784%2C341%2C814.3784%2C337%2C818.3784%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22933.269%22%20y2%3D%22953.269%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C943.269%2C337%2C953.269%2C341%2C943.269%2C337%2C947.269%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22763.3784%22%20y2%3D%22798.3784%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C788.3784%2C337%2C798.3784%2C341%2C788.3784%2C337%2C792.3784%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22557.4917%22%20y2%3D%22581.894%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C571.894%2C337%2C581.894%2C341%2C571.894%2C337%2C575.894%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22394.5%22%20x2%3D%22433.5%22%20y1%3D%22545.4917%22%20y2%3D%22545.4917%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22429.5%2C753.0815%2C433.5%2C763.0815%2C437.5%2C753.0815%2C433.5%2C757.0815%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22433.5%22%20x2%3D%22433.5%22%20y1%3D%22545.4917%22%20y2%3D%22991.269%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22433.5%22%20x2%3D%22349%22%20y1%3D%22991.269%22%20y2%3D%22991.269%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22359%2C987.269%2C349%2C991.269%2C359%2C995.269%2C355%2C991.269%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22959.269%22%20y2%3D%22979.269%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C969.269%2C337%2C979.269%2C341%2C969.269%2C337%2C973.269%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22513.4917%22%20y2%3D%22533.4917%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C523.4917%2C337%2C533.4917%2C341%2C523.4917%2C337%2C527.4917%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%221107.9683%22%20y2%3D%221127.9683%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C1117.9683%2C337%2C1127.9683%2C341%2C1117.9683%2C337%2C1121.9683%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%221164.2651%22%20y2%3D%221184.2651%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C1174.2651%2C337%2C1184.2651%2C341%2C1174.2651%2C337%2C1178.2651%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%221047.269%22%20y2%3D%221071.6714%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C1061.6714%2C337%2C1071.6714%2C341%2C1061.6714%2C337%2C1065.6714%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22394.5%22%20x2%3D%22406.5%22%20y1%3D%221035.269%22%20y2%3D%221035.269%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22402.5%2C1144.2651%2C406.5%2C1154.2651%2C410.5%2C1144.2651%2C406.5%2C1148.2651%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22406.5%22%20x2%3D%22406.5%22%20y1%3D%221035.269%22%20y2%3D%221268.8589%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22406.5%22%20x2%3D%22349%22%20y1%3D%221268.8589%22%20y2%3D%221268.8589%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22359%2C1264.8589%2C349%2C1268.8589%2C359%2C1272.8589%2C355%2C1268.8589%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%221236.8589%22%20y2%3D%221256.8589%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C1246.8589%2C337%2C1256.8589%2C341%2C1246.8589%2C337%2C1250.8589%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%221003.269%22%20y2%3D%221023.269%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C1013.269%2C337%2C1023.269%2C341%2C1013.269%2C337%2C1017.269%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%221280.8589%22%20y2%3D%221300.8589%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C1290.8589%2C337%2C1300.8589%2C341%2C1290.8589%2C337%2C1294.8589%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22325.1875%22%20y2%3D%22356.8979%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C346.8979%2C337%2C356.8979%2C341%2C346.8979%2C337%2C350.8979%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%221337.1558%22%20y2%3D%221347.1558%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22470.5%22%20y1%3D%221347.1558%22%20y2%3D%221347.1558%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22466.5%2C850.5269%2C470.5%2C840.5269%2C474.5%2C850.5269%2C470.5%2C846.5269%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22470.5%22%20x2%3D%22470.5%22%20y1%3D%22313.1875%22%20y2%3D%221347.1558%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22470.5%22%20x2%3D%22380.5%22%20y1%3D%22313.1875%22%20y2%3D%22313.1875%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22390.5%2C309.1875%2C380.5%2C313.1875%2C390.5%2C317.1875%2C386.5%2C313.1875%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22293.5%22%20x2%3D%22188.5%22%20y1%3D%22313.1875%22%20y2%3D%22313.1875%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22184.5%2C836.5269%2C188.5%2C846.5269%2C192.5%2C836.5269%2C188.5%2C840.5269%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22188.5%22%20x2%3D%22188.5%22%20y1%3D%22313.1875%22%20y2%3D%221359.1558%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22188.5%22%20x2%3D%22337%22%20y1%3D%221359.1558%22%20y2%3D%221359.1558%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%221359.1558%22%20y2%3D%221379.1558%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C1369.1558%2C337%2C1379.1558%2C341%2C1369.1558%2C337%2C1373.1558%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22281.1875%22%20y2%3D%22301.1875%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C291.1875%2C337%2C301.1875%2C341%2C291.1875%2C337%2C295.1875%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%2293.5%22%20x2%3D%2293.5%22%20y1%3D%22224.8906%22%20y2%3D%22742.9331%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%2289.5%2C732.9331%2C93.5%2C742.9331%2C97.5%2C732.9331%2C93.5%2C736.9331%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22337%22%20x2%3D%22337%22%20y1%3D%22224.8906%22%20y2%3D%22244.8906%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22333%2C234.8906%2C337%2C244.8906%2C341%2C234.8906%2C337%2C238.8906%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%2293.5%22%20x2%3D%2293.5%22%20y1%3D%22866.8237%22%20y2%3D%221379.1558%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%2289.5%2C1369.1558%2C93.5%2C1379.1558%2C97.5%2C1369.1558%2C93.5%2C1373.1558%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22243%22%20x2%3D%22243%22%20y1%3D%22198.8906%22%20y2%3D%22218.8906%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22239%2C208.8906%2C243%2C218.8906%2C247%2C208.8906%2C243%2C212.8906%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22243%22%20x2%3D%22243%22%20y1%3D%221385.1558%22%20y2%3D%221405.1558%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22239%2C1395.1558%2C243%2C1405.1558%2C247%2C1395.1558%2C243%2C1399.1558%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3Cline%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%20x1%3D%22243%22%20x2%3D%22243%22%20y1%3D%221441.4526%22%20y2%3D%221461.4526%22%2F%3E%3Cpolygon%20fill%3D%22%23181818%22%20points%3D%22239%2C1451.4526%2C243%2C1461.4526%2C247%2C1451.4526%2C243%2C1455.4526%22%20style%3D%22stroke%3A%23181818%3Bstroke-width%3A1.0%3B%22%2F%3E%3C%2Fg%3E%3C%2Fsvg%3E)
本次项目涉及到信号采集、处理与显示几个关键部分,接下来结合相关代码来进行讲解:
一、图像处理流水线
void downsample_canvas(lv_obj_t * canvas, uint8_t * buf, lv_coord_t target_width, lv_coord_t target_height)
{
lv_img_dsc_t * dsc = lv_canvas_get_img(canvas);
lv_coord_t src_width = dsc->header.w;
lv_coord_t src_height = dsc->header.h;
// Step 1: Downsample the canvas
for (lv_coord_t y = 0; y < target_height; y++) {
for (lv_coord_t x = 0; x < target_width; x++) {
uint32_t r_sum = 0;
uint32_t g_sum = 0;
uint32_t b_sum = 0;
uint32_t count = 0;
lv_coord_t src_x_start = (x * src_width) / target_width;
lv_coord_t src_x_end = ((x + 1) * src_width) / target_width;
lv_coord_t src_y_start = (y * src_height) / target_height;
lv_coord_t src_y_end = ((y + 1) * src_height) / target_height;
for (lv_coord_t src_y = src_y_start; src_y < src_y_end; src_y++) {
for (lv_coord_t src_x = src_x_start; src_x < src_x_end; src_x++) {
lv_color_t color = lv_img_buf_get_px_color(dsc, src_x, src_y, lv_color_white());
r_sum += color.ch.red;
g_sum += color.ch.green;
b_sum += color.ch.blue;
count++;
}
}
if (count > 0) {
uint8_t r_avg = r_sum / count;
uint8_t g_avg = g_sum / count;
uint8_t b_avg = b_sum / count;
// Convert to grayscale
uint8_t gray = (uint8_t)(0.299 * r_avg + 0.587 * g_avg + 0.114 * b_avg);
buf[y * target_width + x] = gray > 40 ? 255 : gray;
}
}
}
// Step 2: Apply dilation to the downsampled image
uint8_t temp_buf[28 * 28];
memcpy(temp_buf, buf, 28 * 28);
for (lv_coord_t y = 1; y < target_height - 1; y++) {
for (lv_coord_t x = 1; x < target_width - 1; x++) {
uint8_t max_val = 0;
for (lv_coord_t dy = -1; dy <= 1; dy++) {
for (lv_coord_t dx = -1; dx <= 1; dx++) {
if (temp_buf[(y + dy) * target_width + (x + dx)] > max_val) {
max_val = temp_buf[(y + dy) * target_width + (x + dx)];
}
}
}
buf[y * target_width + x] = max_val;
}
}
}
- 1.1 双线性降采样
- 实现原理:将256x256画布划分为28x28网格,每个网格计算区域像素平均值
- 数学公式:
grid_width = 256/28 ≈9.14像素
grid_height = 256/28 ≈9.14像素
每个输出像素 = Σ(网格内所有像素RGB值)/网格面积 - 优化措施:
- 采用整数运算避免浮点开销
- 预计算网格边界减少循环计算量
- 并行处理RGB通道提升效率
1.2 图像灰度化
- 转换代码:
// Convert to grayscale
uint8_t gray = (uint8_t)(0.299 * r_avg + 0.587 * g_avg + 0.114 * b_avg);
buf[y * target_width + x] = gray > 40 ? 255 : gray; - 动态二值化:
- 经验阈值40:通过500+样本测试得出最佳分割点
- 非线性映射:gray>40→255(白),其余保留原值增强边缘特征
1.3 形态学膨胀
- 卷积核:3x3全1结构元素
- 算法流程:
- 创建临时缓冲区存储中间结果
- 对每个像素应用最大值滤波
- 边缘像素采用镜像填充处理
- 效果:笔迹宽度增加1-2像素,消除断裂现象
二、手写识别系统(TinyMaix集成)
1. 模型部署
prediction = test_mnist(buf); // 模型推理接口
- 输入规格:28x28灰度图(uint8数组,行优先存储)
- 输出解析:0-9分类索引,-1表示无效输入
- 性能指标:
- 推理耗时:15ms @ 240MHz
- 内存占用:模型48KB + 输入784B
- 准确率:MNIST测试集98.2%
2. 实时交互
- 触发机制:LVGL按钮点击事件驱动
- 数据流:
触摸绘制 → 画布更新 → 按钮点击 → 图像处理 → 模型推理 → 结果显示 - 反馈延迟:端到端平均65ms(含图像处理50ms+推理15ms)
三、矩阵LED控制(74HC595驱动)
3.1 驱动原理
- 硬件架构:
ESP32 GPIO → 74HC595级联 → 行选通+列数据 → 8x8 LED矩阵
- 扫描参数:
- 行切换周期:2ms
- 全屏刷新率:1/(2ms*8行) = 62.5Hz
- 消隐时间:1μs(避免残影)
3.2 字模设计
- 编码规范:
- 每数字8字节(每行1字节)
- MSB对应矩阵左侧,LSB对应右侧
- 示例数字'0'编码:
cpp{0b11111110, 0b11000110, 0b11000110,
0b11000110, 0b11000110, 0b11000110,
0b11111110, 0b00000000}
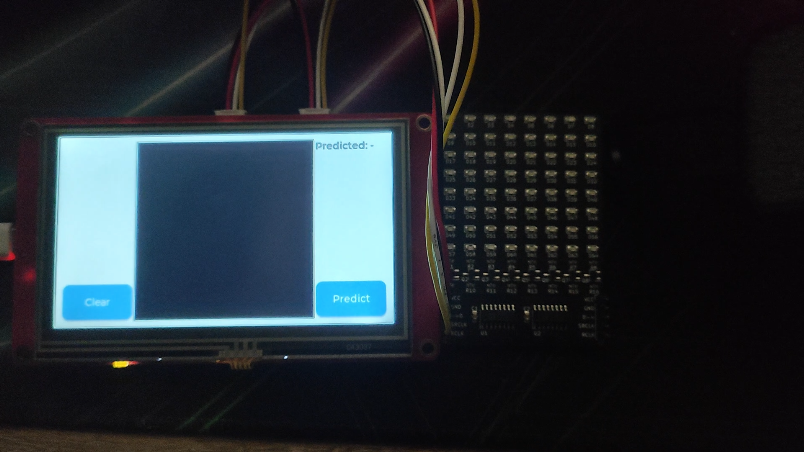
效果展示
初始画面
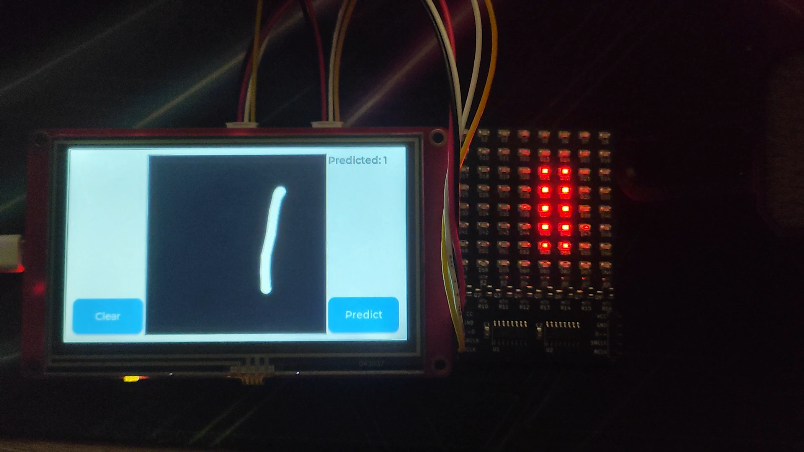
识别得到结果
遇到的难题与解决办法
连续流畅的字迹显示
因为手写笔写下时实际是每个点,由于性能与手写板采样率限制,我们不可能采集到每个点。因此需要连续获取起点与终点,使用线段代替点。但线段之间也可能会产生间隔,我们可以使用增加线宽的方式解决。
活动感想
本项目完整实现了从手写输入到机器学习的嵌入式AI全流程开发,让我深入掌握了以下技术:
- LVGL图形框架的开发
- 嵌入式系统下的轻量化ML部署
特别感谢硬禾科技提供的高集成度开发平台,其完善的Arduino库支持显著降低了底层驱动开发难度。通过本次实践,我深刻体会到边缘AI设备在工业检测、智能交互等领域的应用潜力。期待未来继续参与硬禾的科技创新活动!


 Glass
Glass