Hackaday上的项目汇总-远程呈现技术的相关项目
收藏
分享
脑图
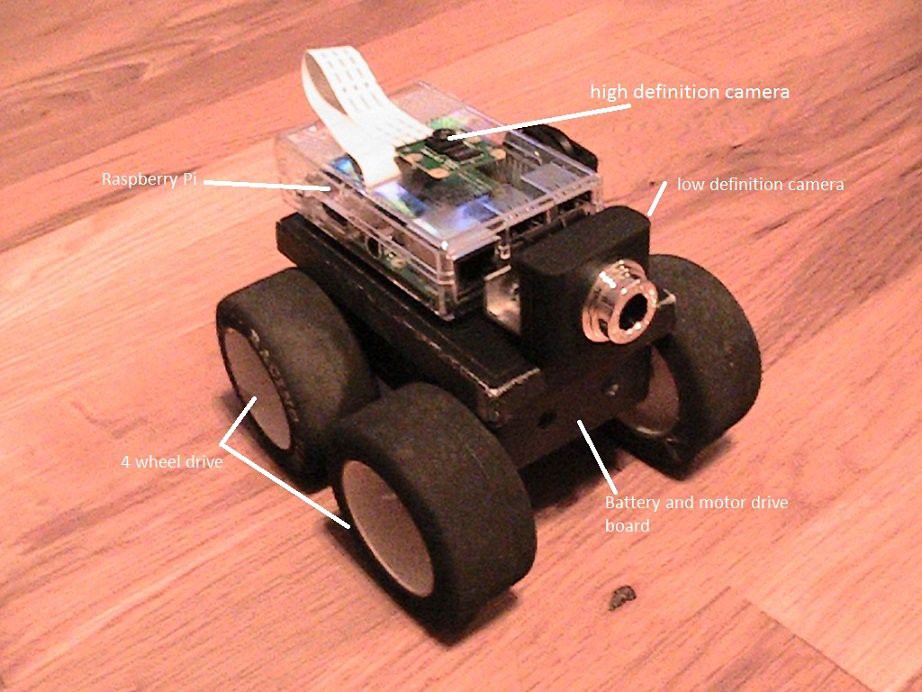
描述:InspectorBot是一款基于Raspberry PI的移动机器人,允许用户检查肮脏的黑暗和危险区域,从泄漏到损坏智能手机的安全性。
描述:如何使用UV4L框架为物联网构建双向音频3D FPV 720p @ 30fps视频远程呈现。

描述:TTBN Alpha是一个通过Web界面控制的远程跟踪平台。
描述:项目C.A.T.P.O.O.P.的目标是建立一个原型自动航行无人机,可通过4G网络通过手机访问和编程。无人机将使用GPS航路点进行导航。它还将配备传感器和摄像头,以提供视觉反馈,遥测数据和环境信息。这款无人机原型机采用层压橡木和PVC管制成的5英尺3英尺三体船体。安装在船中部的防水外壳将容纳电子设备,伺服系统和电池,以操作简单的帆和方向舵控制连杆。

描述:我使用Android Nexus 7平板电脑进行视频会议。 带有STM32 ARM处理器和FTDI USB芯片的定制PCB,用于连接Android平板电脑和电机。

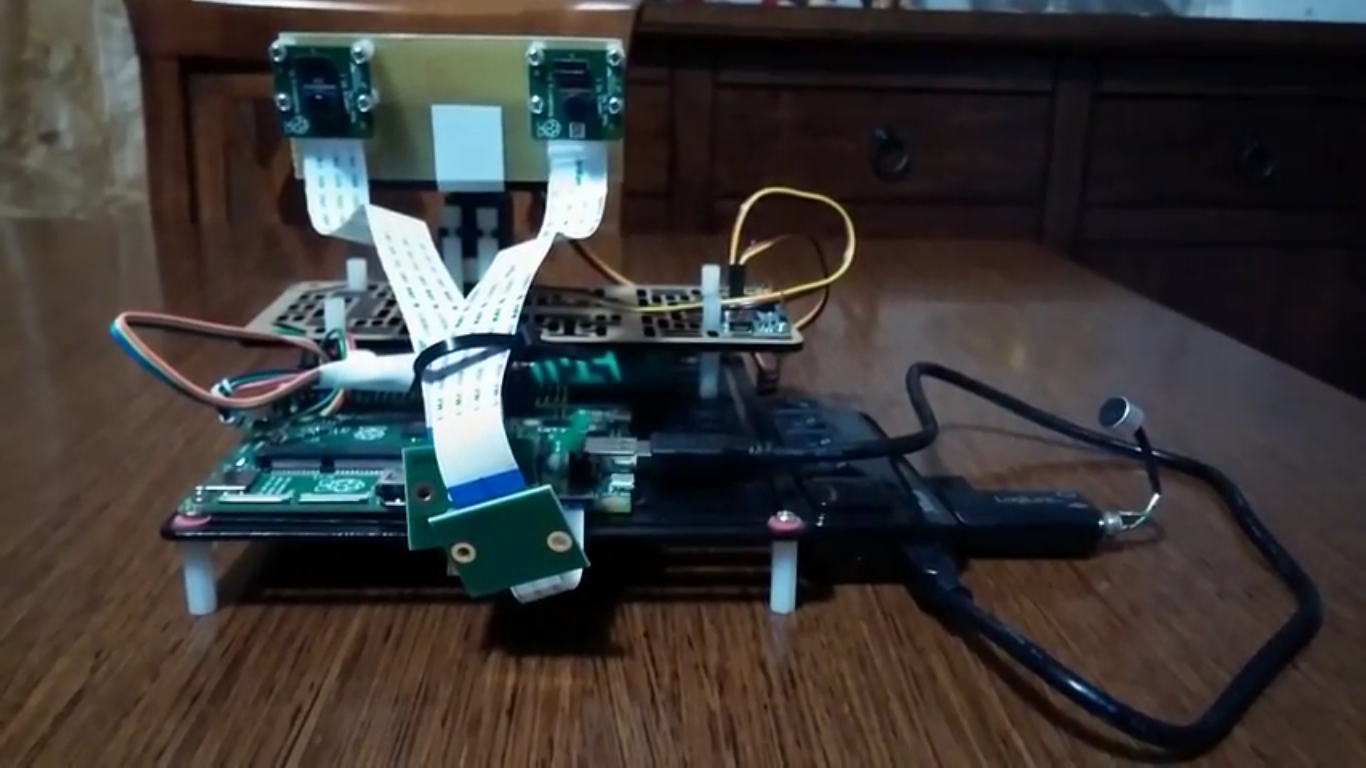
描述:在2013年第一次尝试Oculus Rift后,我立即想用它来构建一些东西。 相对较快我决定开发一种安装在3个伺服系统上的摄像系统。 摄像机应跟随用户的头部运动。所以我开始构建第一个使用单个相机的原型。 在它工作的方式比我想象的更好,我买了2个广角网络摄像头,现在给我一个立体视图。
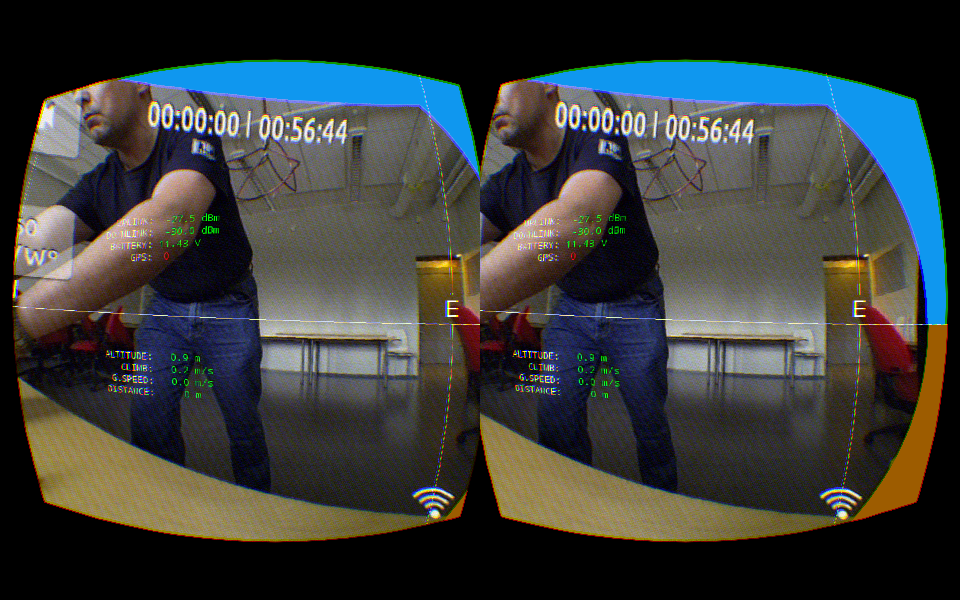
描述:从UAV提供远程呈现的直接方法是将一对摄像机安装到可操纵的万向节上,控制万向节以匹配HMD方向并将视频流对发送到HMD视图。 这种方法虽然原则上很简单,但却存在一些重大的实际问题.最明显的缺点是头部和相机移动之间的不可接受的延迟以及由此导致的观看图像中的压倒性摇摆。 这源于头部运动首先被测量(~1 ms),传输到无人机(如果嵌入到典型的rc发射器流~20 ms),舵机必须完全响应(高度依赖,但100 ms是乐观的),相机必须获取图像并将其发送到地面站(约20毫秒),最后,在Oculus Rift的情况下,计算机必须捕获图像并处理并在HMD上显示(取决于 相互相位~30 ms)。 而不是可接受的20毫秒,滞后是十倍。
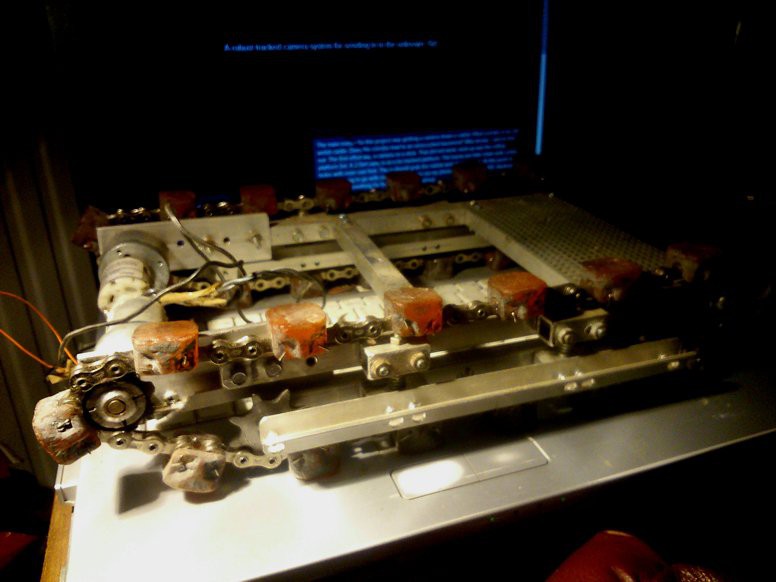
描述:这个项目是一个相机和灯光的滚动平台,我想在城堡中发送一块瓦砾地板的紧密通道,我不会详细介绍但我相信那里有一个未被记录的地下室。 对于驱动系统我想要轨道,车轮将完成,我最终得到了带有中心孔和树脂铸造结节的自行车链条。 在受控条件下,结节允许它爬到任何向后翻转的位置。 相机,网络摄像头位于2 Dof底座上。 电致发光将来自超亮低功率LED。 或红外LED看到相机可以在该光范围内看到。 至于控制; 我的手机或笔记本电脑作为控制器,wifi,蓝牙或收音机都可以。 我们会看到。
描述:FPV飞行是即将到来的技术。 今天,deticated视频发射器和接收器用于从飞机或多旋翼飞行器向飞行员发送复合质量视频。 有一些替代品可以获得更高质量的fpv,但它们非常昂贵(dji lightbridge和blackmagic模块)。
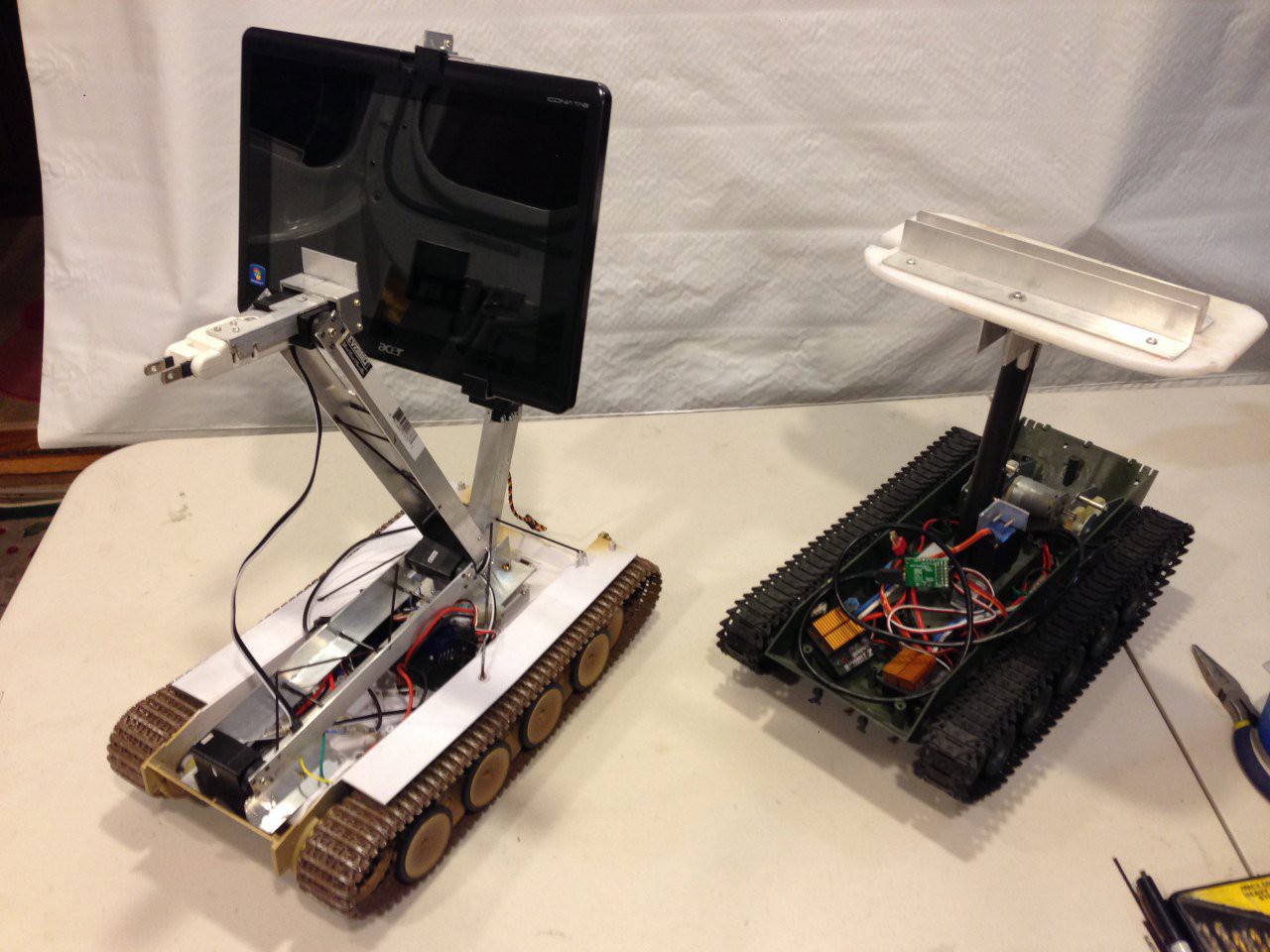
描述:没有关系,你有一个炸弹来解除武装或从远处玩耍,Skype机器人随时为您服务。这款远程呈现机器人可以代表您在任何距离上进行网络覆盖(Wifi,3G或LTE等)。最好的部分是...... Mark I的成本约为200美元,Mark II的成本为300美元。
评论
0 / 100
查看更多
 Lucia li
Lucia li2019-08-19
1084

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号