Hackaday上的项目汇总-跟踪项目
收藏
分享
脑图

描述:我一直想要建造一个机器人,我已经看过许多非常小的工具包或非常昂贵的工业级机器人。 我正在寻找的东西是建造一个比12-18英寸长的玩具更大的东西,并且非常耐用。另一个要求是能够为未来的项目带来有效载荷。此时机器人本身没有特定的用例,在开始确定它将完成的具体任务之前,我专注于核心组件。 可能它会利用OpenCV并附加一个6DOF臂或一个炮塔。我一直在与tankchain.com的Joshua合作进行底盘设计并从他那里购买了我的履带,他很高兴与我一起工作,我无法赞美油箱踏板的质量。

描述:TTBN Alpha是一个通过Web界面控制的远程跟踪平台。
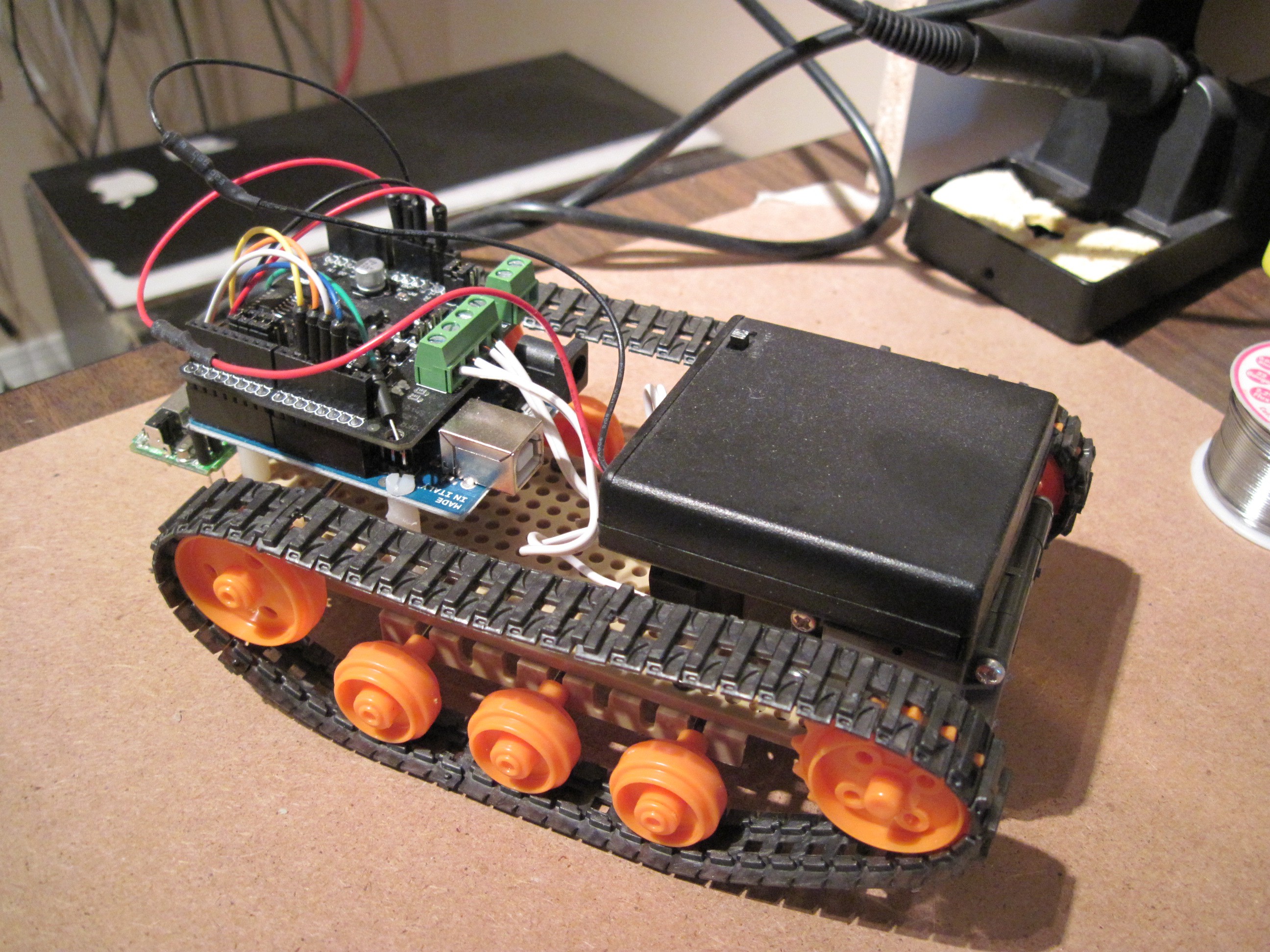
描述:有很多机器人套件,但我喜欢投资Arduino作为探索机器人技术的基础。 我想我们会得到Arduino Uno,几个盾牌来控制电机和传感器等等,在它上面扔一些轮子,而blammo,有一个机器人。
描述:MyzharBot是一个基于Linux的自主机器人。 这是一个机器人项目,使用计算机视觉来检测障碍物,目标,人和更多。
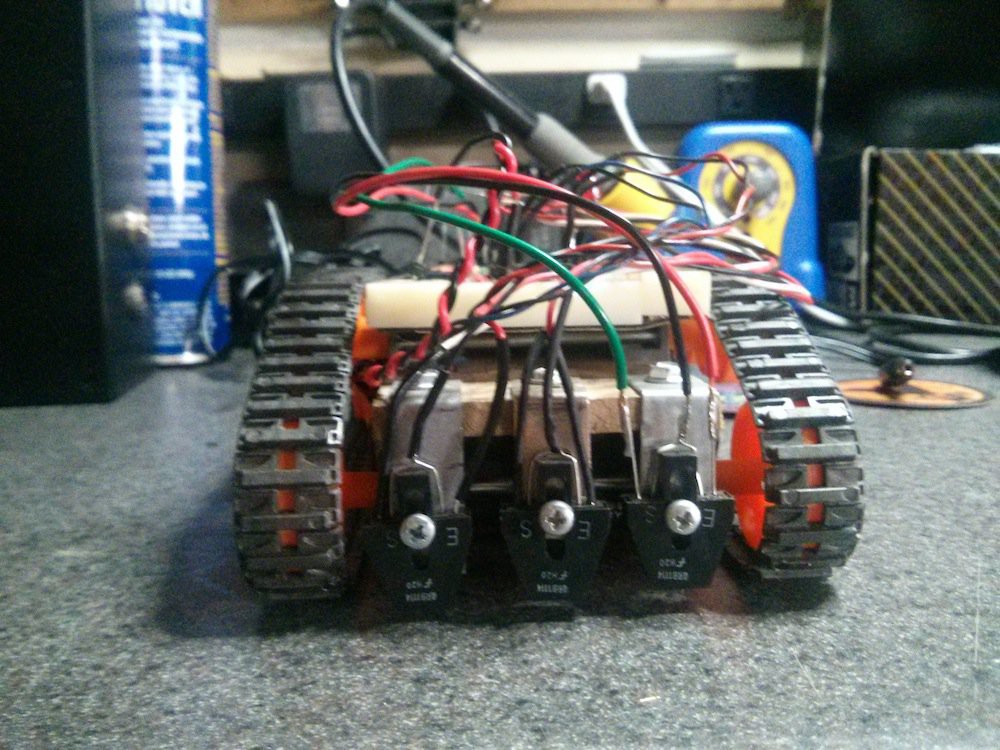
描述:使用前面的3个红外传感器,机器人可以确定它的运行时间以及何时偏离航向。 3个红外传感器也有助于确定它何时越过十字路口。 最初的计划是轮驱动,但发现使用轨道,我可以更容易调整路线校正,而无需前进。 由ATTiny2313控制,使用在instructables上找到的并行版Ghetto Programming进行编程。

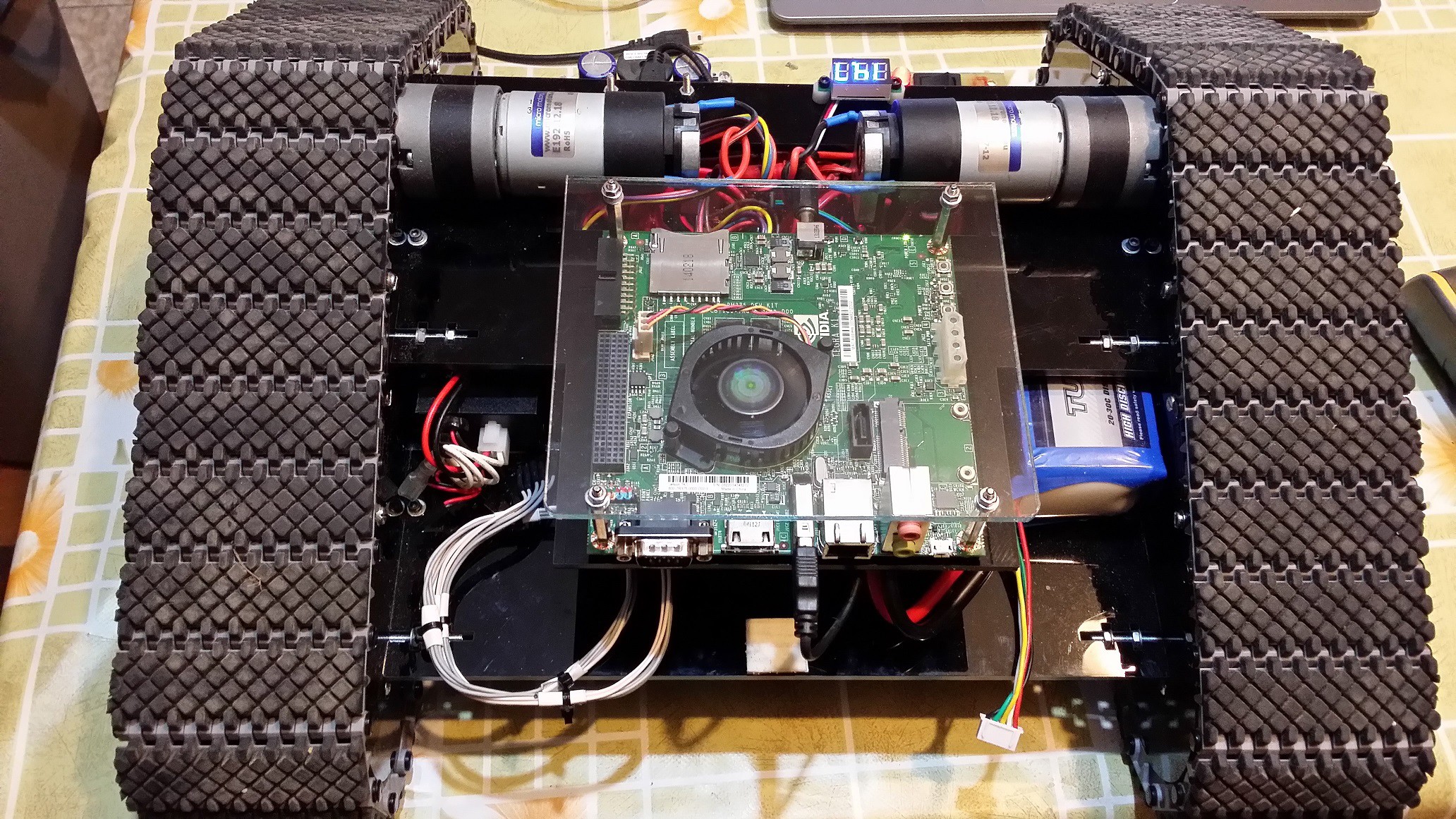
描述:该项目的目标是创建一个易于扩展的机器人平台,能够在所有条件下在户外操作。 轨道提供卓越的牵引力和地面压力,而FRC Mini-CIM电机提供700 in-lb的扭矩,足以使机器人在崎岖地形上移动并承载大量有效载荷。
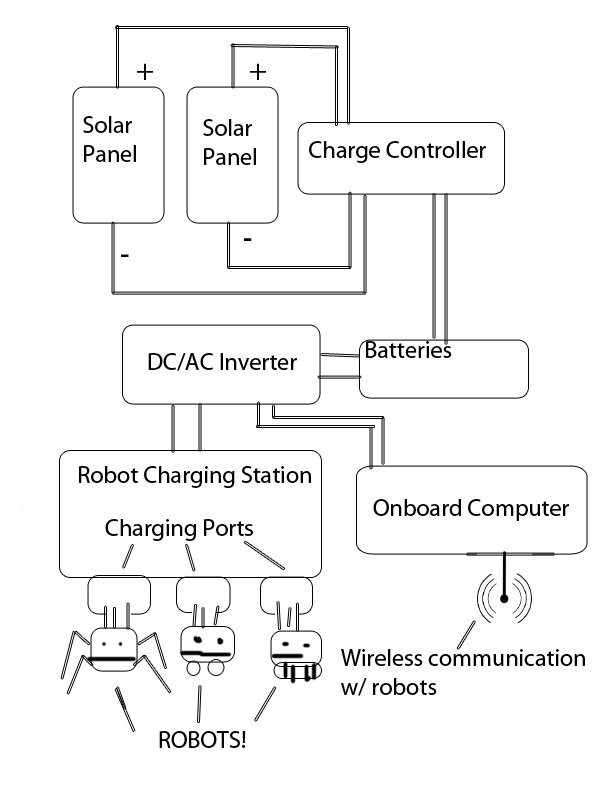
描述:核心概念是用于一群机器人的太阳能(或任何可再生的适当的)充电站。
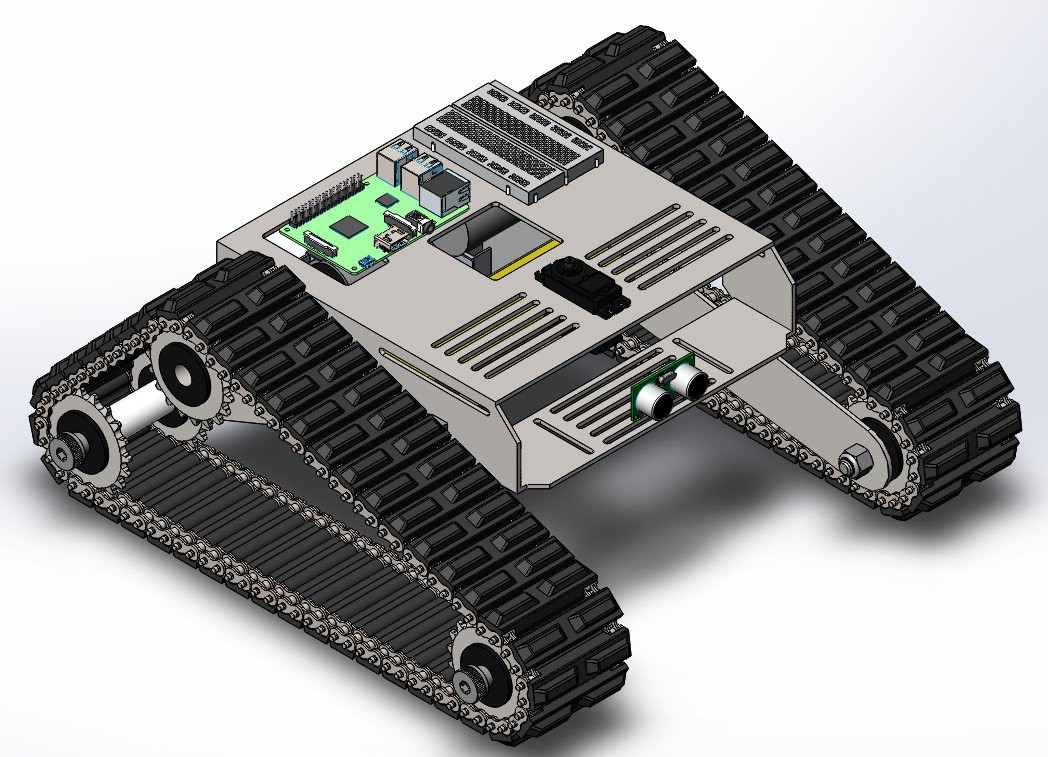
描述:这是一种用于小型到大型机器人和无线电控制车辆的模块化连续轨道系统。 我对目前市场化设计的可用性和设计感到失望。 对于非常小的项目和大型车辆的一些选项,似乎有几种选择。 但两者之间没有选择。 另外,我注意到了一些我希望用我的设计解决的常见设计问题。
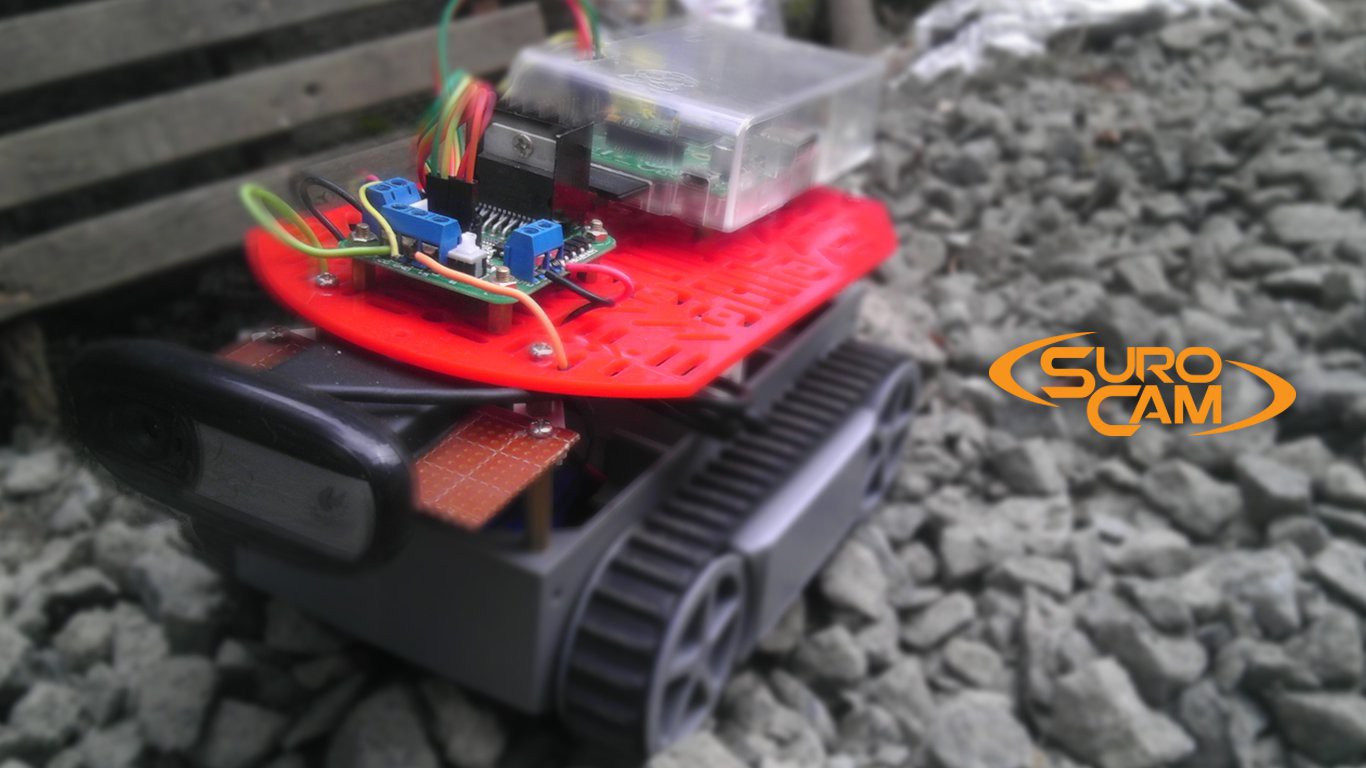
描述:这个项目的构建基于如何制作一个每个人都可以构建的简单便宜的在线监控摄像机器人的想法。 不仅机器人还必须易于使用和维护。 在MagPi杂志上使用树莓派,几个便宜的组件,机器人底盘/ RC车和webiopi教程,这个项目已经成功建立。 要启动此机器人可在线访问,请使用www.ngrok.com上的ngrok服务。 没有任何忙乱和困难的端口转发配置,现在可以通过使用firefox或chrome浏览器来控制世界上的任何人。
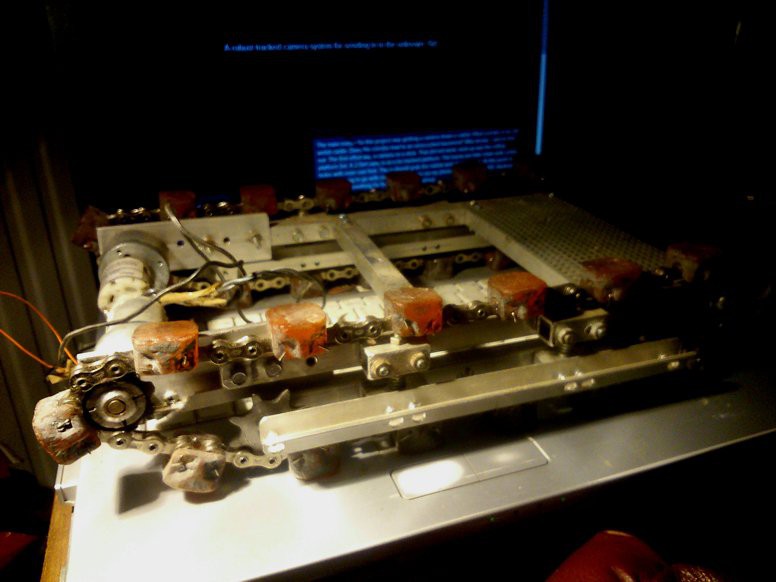
描述:这个项目是一个相机和灯光的滚动平台,我想在城堡中发送一块瓦砾地板的紧密通道,我不会详细介绍但我相信那里有一个未被记录的地下室。 对于驱动系统我想要轨道,车轮将完成,我最终得到了带有中心孔和树脂铸造结节的自行车链条。 在受控条件下,结节允许它爬到任何向后翻转的位置。 相机,网络摄像头位于2 Dof底座上。 电致发光将来自超亮低功率LED。 或红外LED看到相机可以在该光范围内看到。 至于控制; 我的手机或笔记本电脑作为控制器,wifi,蓝牙或收音机都可以。 我们会看到。
评论
0 / 100
查看更多
 Lucia li
Lucia li2019-08-19
1187

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号