hackster.io资源汇总: Arduino Nano R3中类别为 机器人 的部分文章设计
收藏
分享
脑图
图片
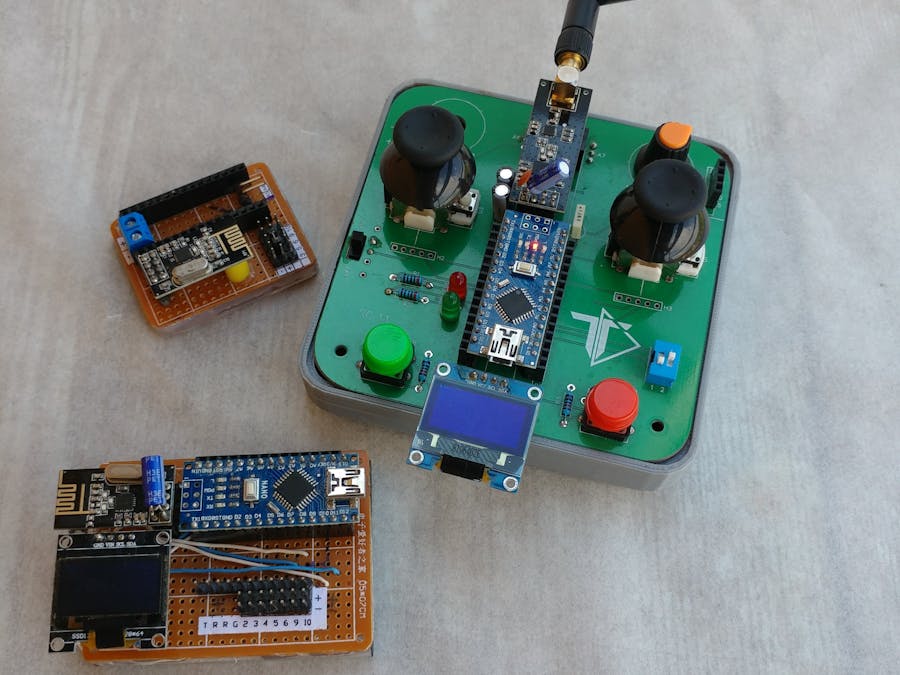
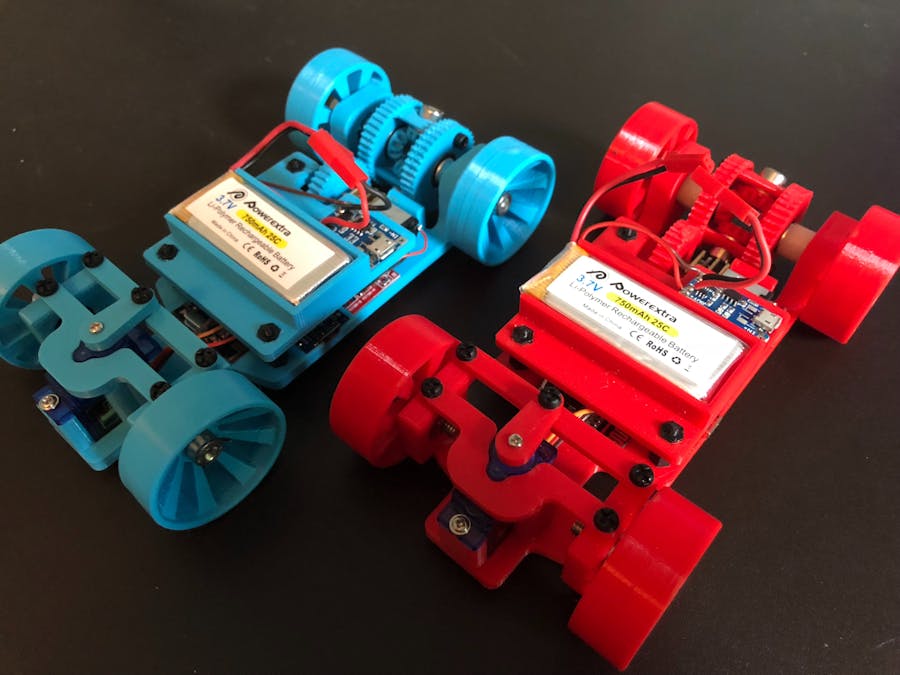
概述:制造自己的遥控汽车,配有arduino和nrf24l01模块。
图片
概述:直到可爱的绘图伙伴v1完成,scara机器人- arduino i计划另一个绘图机器人,主要目的是覆盖一个大的空间。
图片

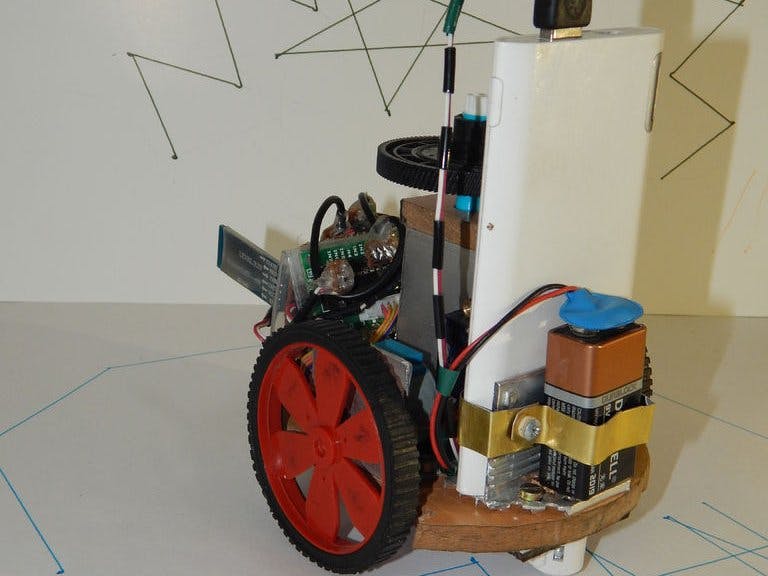
概述:带有两个超声波近程传感器和nrf24通信+遥控的自平衡机器人。
图片
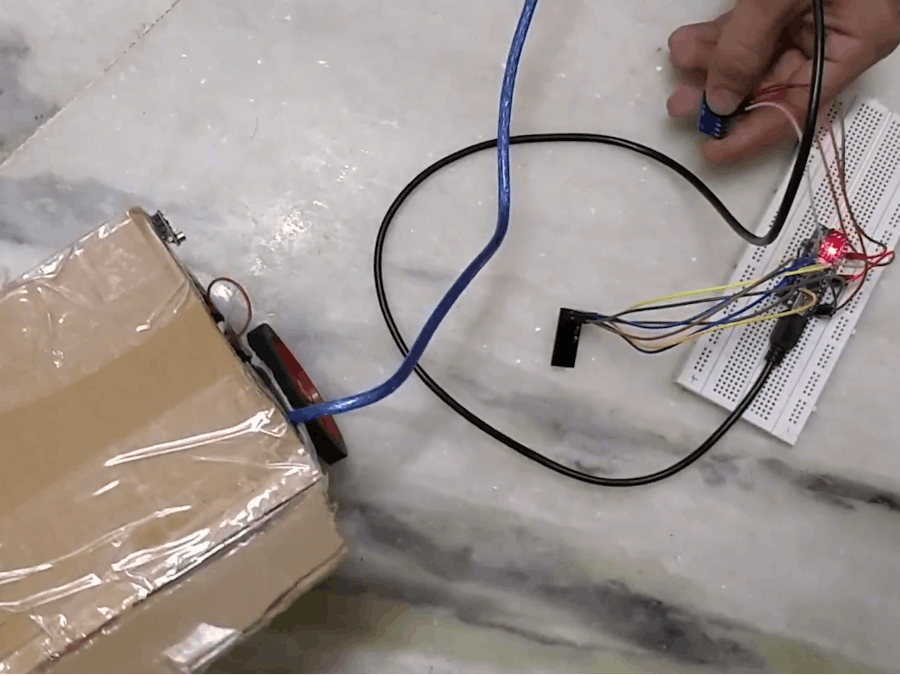
概述:轮椅的运动可以通过简单的手势来控制。这个项目帮助他们在没有任何人帮助的情况下坐轮椅从一个地方移动到另一个地方。他们可以简单地用手势控制轮椅。arduino uno控制轮椅的电机,arduino nano与mpu6050相连,MPU 6050用于检测手的运动。数据被无线发送到uno,uno根据手的运动做出响应。
图片

概述:制造一个太空伴侣机器人。这个项目的灵感当然来自2019年maker faire bay area的alex glow和sophy wong。
图片
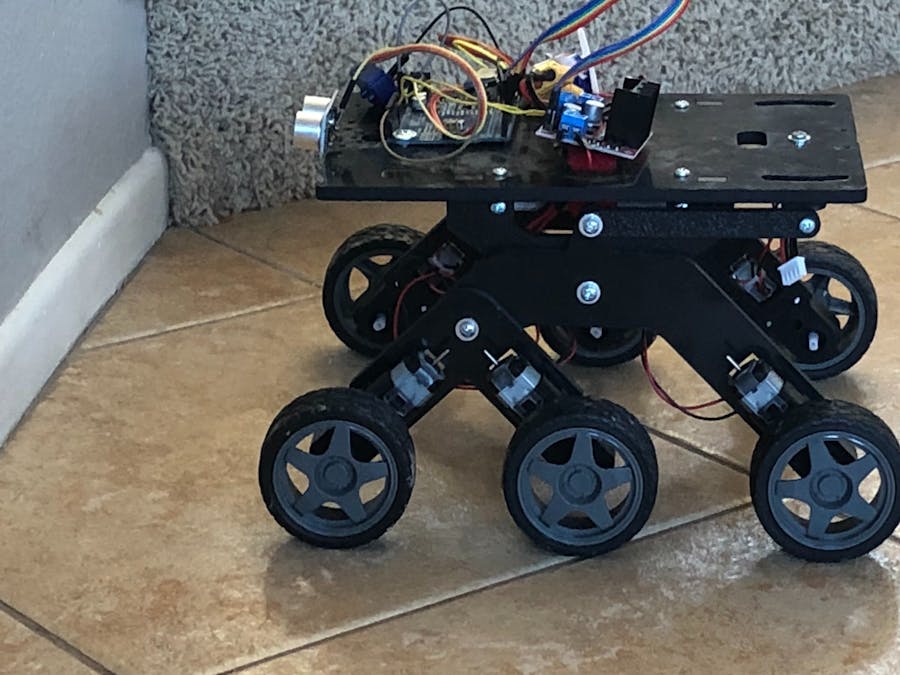
概述:制造一款能够在你家周围做很多活动的自主漫游车。一个在无人的时候不会撞到障碍物的机器人。
图片

概述:这里有一个制作“爬行机器人”的分步指南
图片

概述:在这个项目中,用乐高版的《我们的小朋友》,教他如何避开障碍。
图片
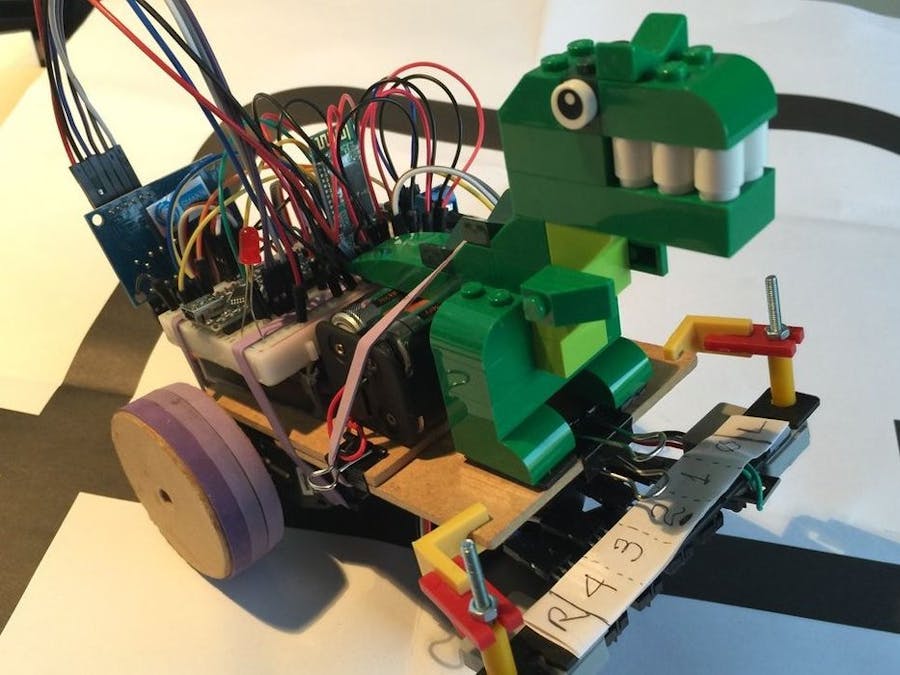
概述:“雷克斯,机器人”将尝试找到如何以最短和最快的方式从“迷宫”中逃离。
图片
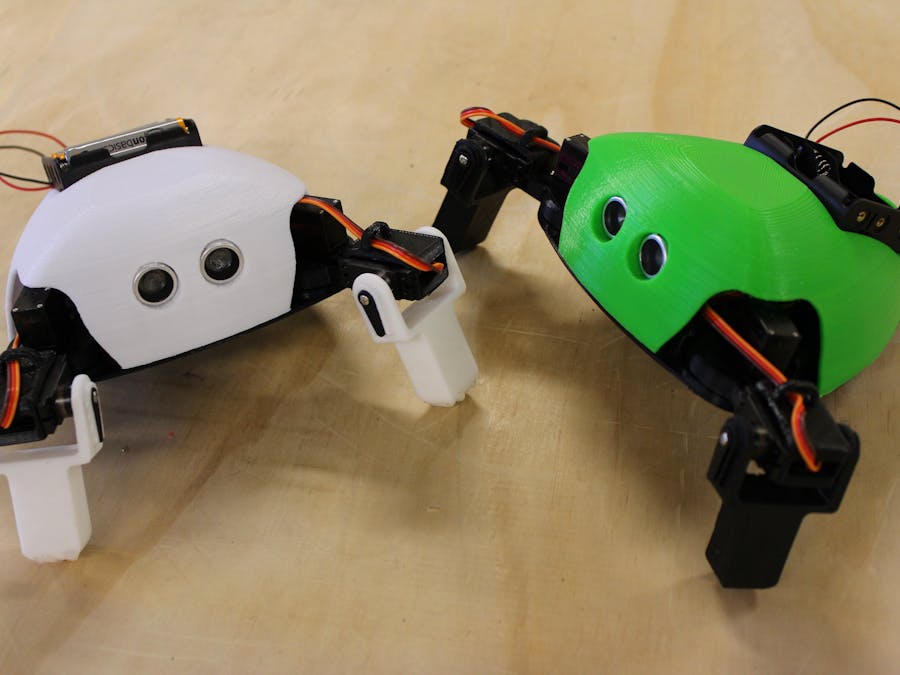
概述:这只小动物是一个简单的arduino行走机器人,完全3d打印。
图片

概述:它不仅仅是一架四轴飞行器...这是一台开源机器!
图片
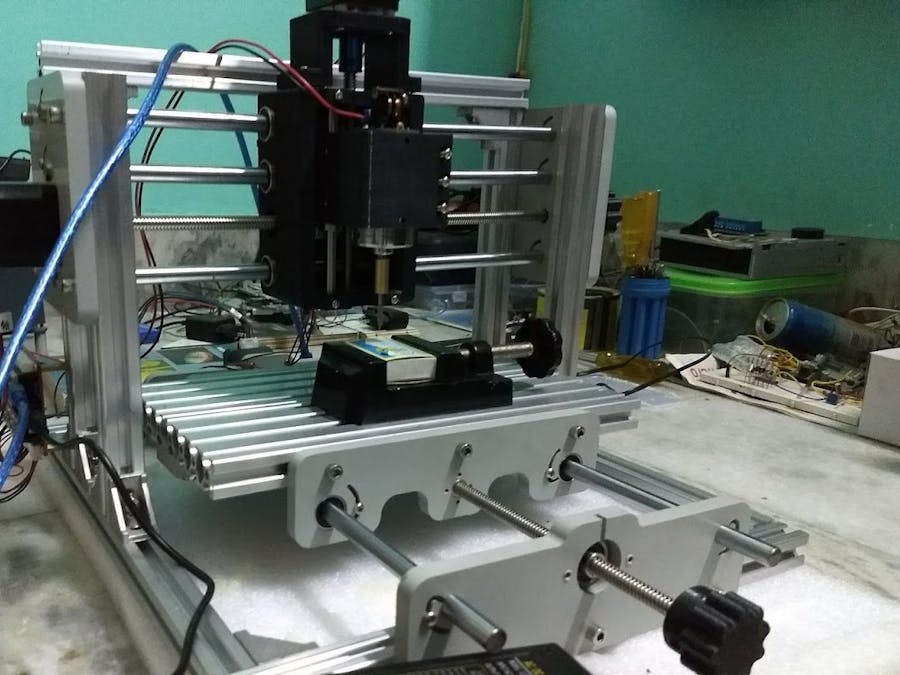
概述:这是基于grbl软件和2020铝型材的三轴数控绘图仪/雕刻机。低成本雕刻和pcb制造双面。
图片
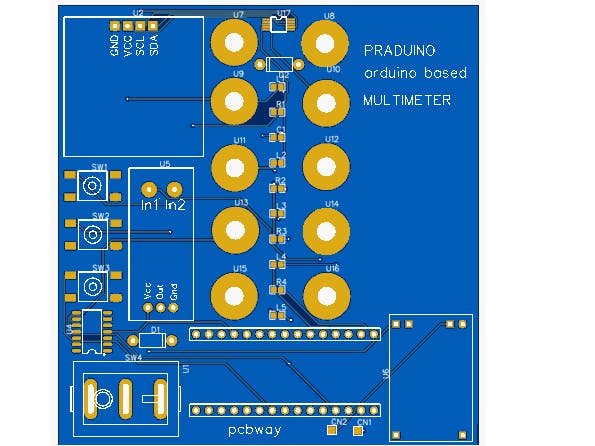
概述:这是一款基于便携式数字arduino nano的praduino万用表。praduino万用表基于arduino nano。该万用表可以在正常电源或3.7v lipo电池下工作。
图片
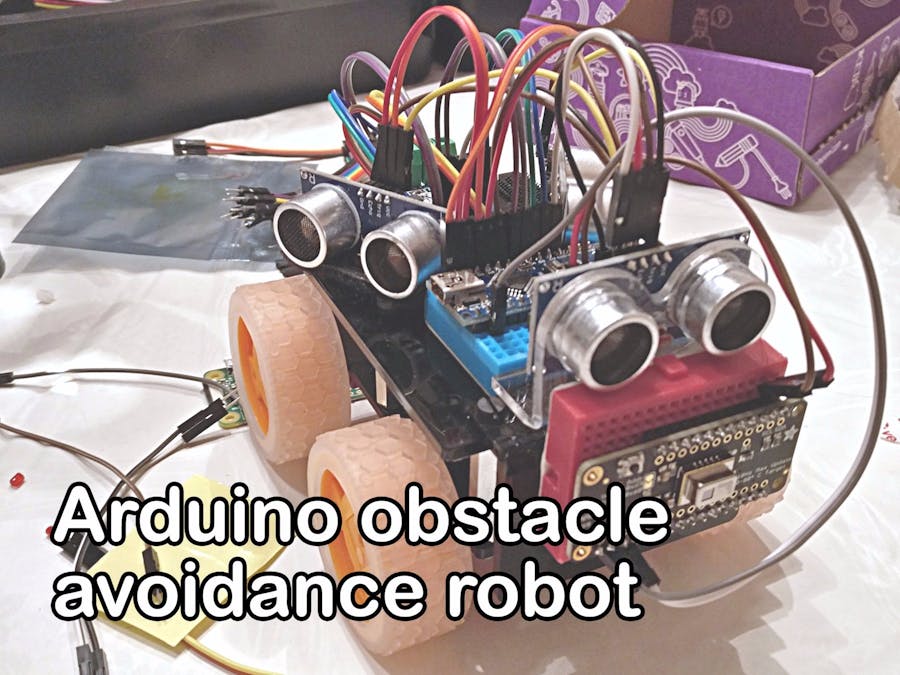
概述:基于arduino nano的物体回避机器人,它使用3个hc-sr04传感器来探测潜在的障碍物并修正其轨迹。
图片
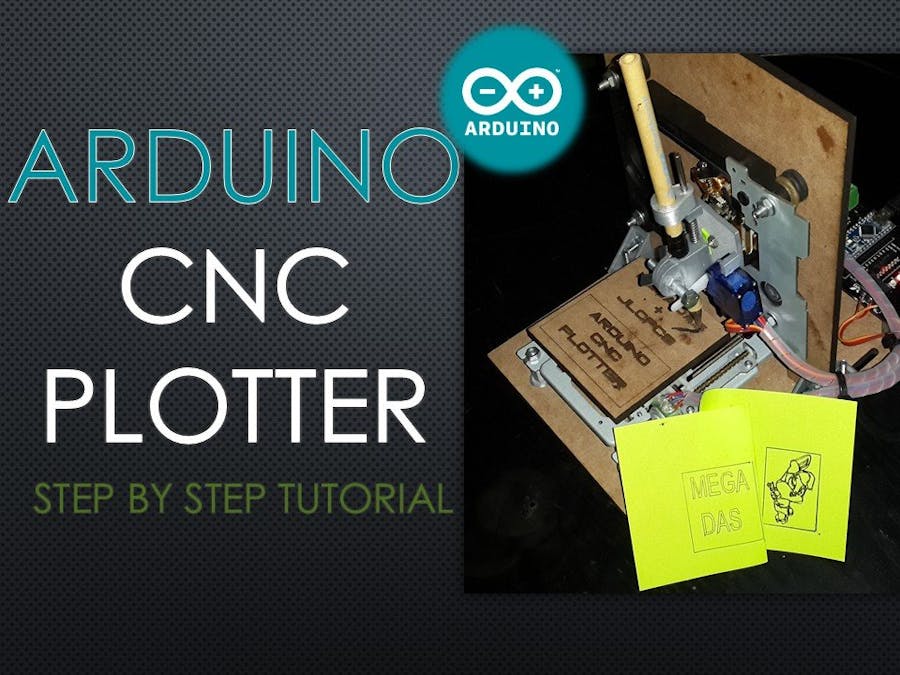
概述:这个教程,我将向你详细展示如何轻松制作自己的绘图机。
图片
_RFWJTw8nc8.jpg?auto=compress%2Cformat&w=900&h=675&fit=min)
概述:所有的部件都包括建造一只会走路的智能机器人恐龙的工具箱。
图片

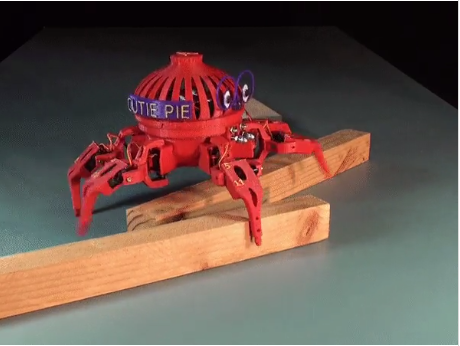
概述:一个酷得像蜘蛛一样的机器人。
图片
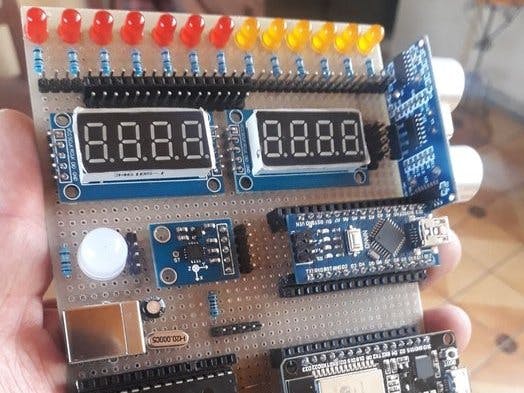
概述:这个微控制器实验室旨在加快项目进度,建立简单、干净的连接。
图片

概述:一个17自由度的人形机器人,由android控制。它能够识别地形并调整行走方式。配备3d陀螺仪用于稳定,并配备跌倒检测系统。
图片

概述:这是一种下肢外骨骼,旨在帮助行走障碍患者进行治疗并执行简单的任务。用于康复治疗的机器人学是一个新兴领域,有望成为自动化训练的解决方案。机器人康复可以取代治疗师的体能训练,允许更密集的重复运动,以合理的成本提供治疗,通过测量力和运动模式定量评估运动恢复水平。
图片

概述:在这个项目中,我们将从旧的pc cd-rom中提取零件,并使用(基本上是任何类型的)arduino构建一个可以在g代码上运行的完全工作的cnc机器。
图片

概述:让我们制作一个简单的机器人,它可以通过android应用程序和你说话,并根据你的语音命令移动。这个机器人还可以根据应用程序中内置的问题答案对一些问题给出简单的答案。
图片
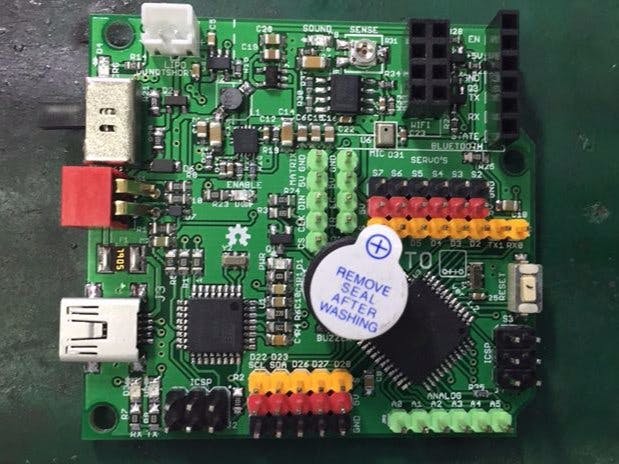
概述:otto builder社区要求,这里我们正在为otto或任何biped机器人开发最好的印刷电路板。
图片
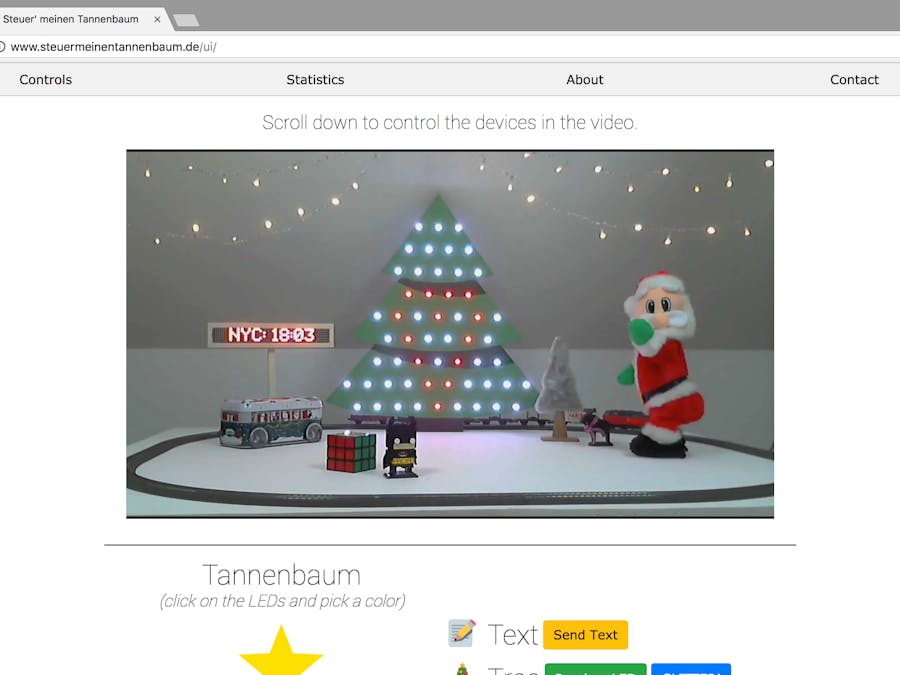
概述:控制树上55个rgb leds中的任何一个,让santa twerk为您工作,控制模型铁路,或者在led点阵上显示自定义文本。
图片
概述:walbi,一款2:1比例的人形机器人,配有arduino运动捕捉和回放程序。用手移动,录音,然后回放。
图片
概述:一款3d打印、开源、基于arduino、蓝牙控制、可刮擦编程的六足机器人,专为游戏、教育和娱乐而打造!通过游戏手柄进行蓝牙控制,也可以使用麻省理工学院的暂存拖放编程语言进行编程。它有一个3d打印的游戏垫,可以访问60个预编程的动作,您甚至可以用scratch编程按钮来执行您自己的自定义操作。hexapod有一个附件系统,允许您设计自己的3d打印装饰和游戏附件。已经开发了一系列游戏,包括joust和capture flag。
图片

概述:在制造无人驾驶飞机或飞机时,了解组合发动机和escs的推力是很重要的。这个自己动手的项目不仅在lcd上向你展示了推力,而且还展示了:电压、电流、瓦特、温度、pwm等等!
图片

概述:大型六足动物项目,max是开源的、3d打印的、arduino供电的、蓝牙控制的,而且100%纯粹是乐趣。
图片
概述:这个项目的题目是开发一个功能齐全的移动原型“流动站”,负责温度、湿度和亮度等环境数据的采集。这个想法是在将来给这个原型增加其他功能/部件,以真正得到一个火星漫游模拟器。
图片

概述:开发一种智能椅子,使用dps310传感器和arduino套件来构建一个完整的系统,该系统可以与android移动设备同步,以通知用户改变他/她的坐姿,或者只是站起来行走几秒钟。
图片
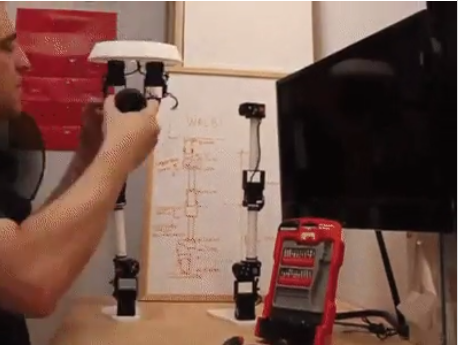
概述:使用walabot作为“虚拟油门踏板”,感知你的脚离扫描仪的距离,并将这个值转换成遥控汽车的油门信号。
图片
_slIdROflbE.jpg?auto=compress%2Cformat&w=900&h=675&fit=min)
概述:一顶有温度传感器的帽子,根据年龄,如果有中暑的可能,蜂鸣器会发出哔哔声。这甚至可以在手表和皮带等其他设备中实现。
图片
概述:这个装置使用4个伺服驱动的轮子向前、向后、向左、向右和转动。目前处于串行或蓝牙控制下。
图片
概述:制作一个便宜又好看的led矩阵。
图片

概述:让我们测试hc-12蓝牙模块,它有1.8公里范围。
图片

概述:在温室环境中自主驾驶并识别疾病的机器人。
图片
概述:我已经改进了这个有20年历史的5自由度关节机械臂的控制系统,集成了tp控制和编程接口。
图片

概述:该系统利用物联网技术给出纯净水的ph值。
图片
概述:在这个项目中,我将向您展示如何使用射频(无线)使两个arduinos相互交谈。现在,我将向您展示所有这些项目,并通过让一个arduino使用rf433模块将数据无线发送到另一个arduino,并在i2c串行lcd上显示出来,从而改进这些项目。
图片
概述:建造一个具有特定规格的机器人,并与竞赛规则(相扑)相匹配,这个机器人必须有精确的尺寸来战斗和生存,以避免被从环中穿过。
图片

概述:结合一个旧机器人,一个旧xbox方向盘和两个蓝牙模块,你就有了一辆无线汽车。
图片

概述:该控制方案是水下rov项目的一部分,目的是使用视频游戏控制器控制rov。
图片
概述:一个简单的arduino机器人套件,用于stem教育和团队。
图片
概述:跟踪太阳运动的光伏板模拟。
图片

概述:可以用面具两边的滑块来控制一个蜘蛛侠面具的眼睛。通过增加可以由侧面按钮控制的小型伺服系统来使它变得更好。添加蓝牙模块让我可以拥有不同的模式,可以由手机控制。
图片
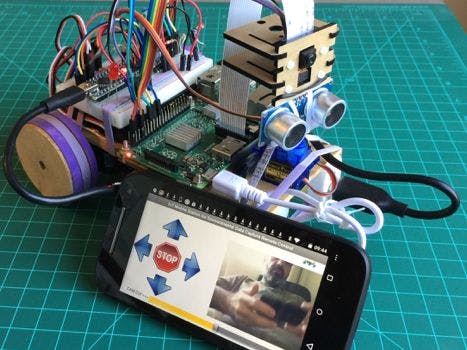
概述:使用arduino制作一个可以通过手机控制的wifi机器人。使用应用rootside-wifi命令中心通过本地网络或互联网向arduino发送udp字符串,arduino将监听特定端口中的udp数据包。监听器接受udp包,处理它,提取字符串,然后使用它运行命令来驱动电机。
图片
概述:一种自动药丸分配/包装机,将药丸包装到标准的14槽药丸盒中,以节省时间、金钱和减少错误。
图片
概述:我们建立这个项目是为了执行一些机器人技术。picto92是一款移动线跟踪机器人。机器人是完全自动的任何机器:它自己启动,决定自己的工作方式,自己停止。这是一个包含传感器、控制系统、操纵器、电源和软件的系统,它们一起工作,以快速和精确的方式自动执行任务。
图片
概述:建立遥控strandbeest模型的最简单方法,在本教程中,将讲述如何轻松地在beest上添加一对电机,以便像坦克一样遥控它。
图片

概述:我想把一个老furby变成一个著名的作家animatronics bot,用提供明智的文学引语和评论打断我的日常工作。
评论
0 / 100
查看更多
2019-08-15
1529

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号