Hackaday上的项目汇总-机器人手臂项目
收藏
分享
脑图

描述:这是一个完全由我自己设计的划线机器人。 它使用2个精确的步进电机用于肘部和肩部。 手腕采用简单的伺服制造。 机器人可以使用2个工具:一支笔和一支橡皮擦在笔的对面。 字体是100%自制的矢量字体。 机器人从ASCII文件写入。 提供所有设计文件(代码),它是开源的。
描述:通过CNC雕刻一种特殊的复合材料Hylite来制造折叠和铰链。 如此制作的Zatsit在Kickstarter上直到2018年8月5日。快点!

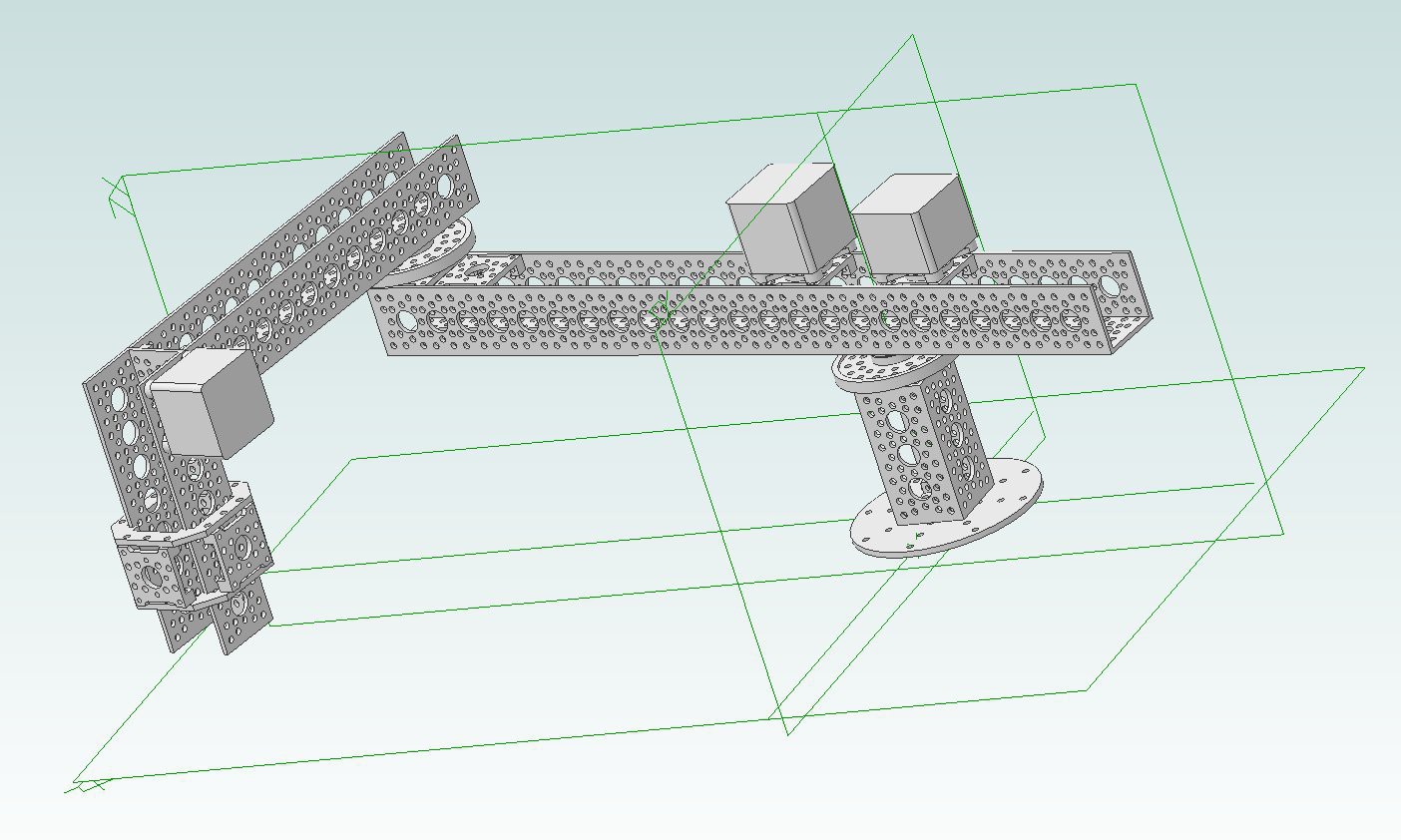
描述:Walter是复古风格的6自由度机器人手臂。
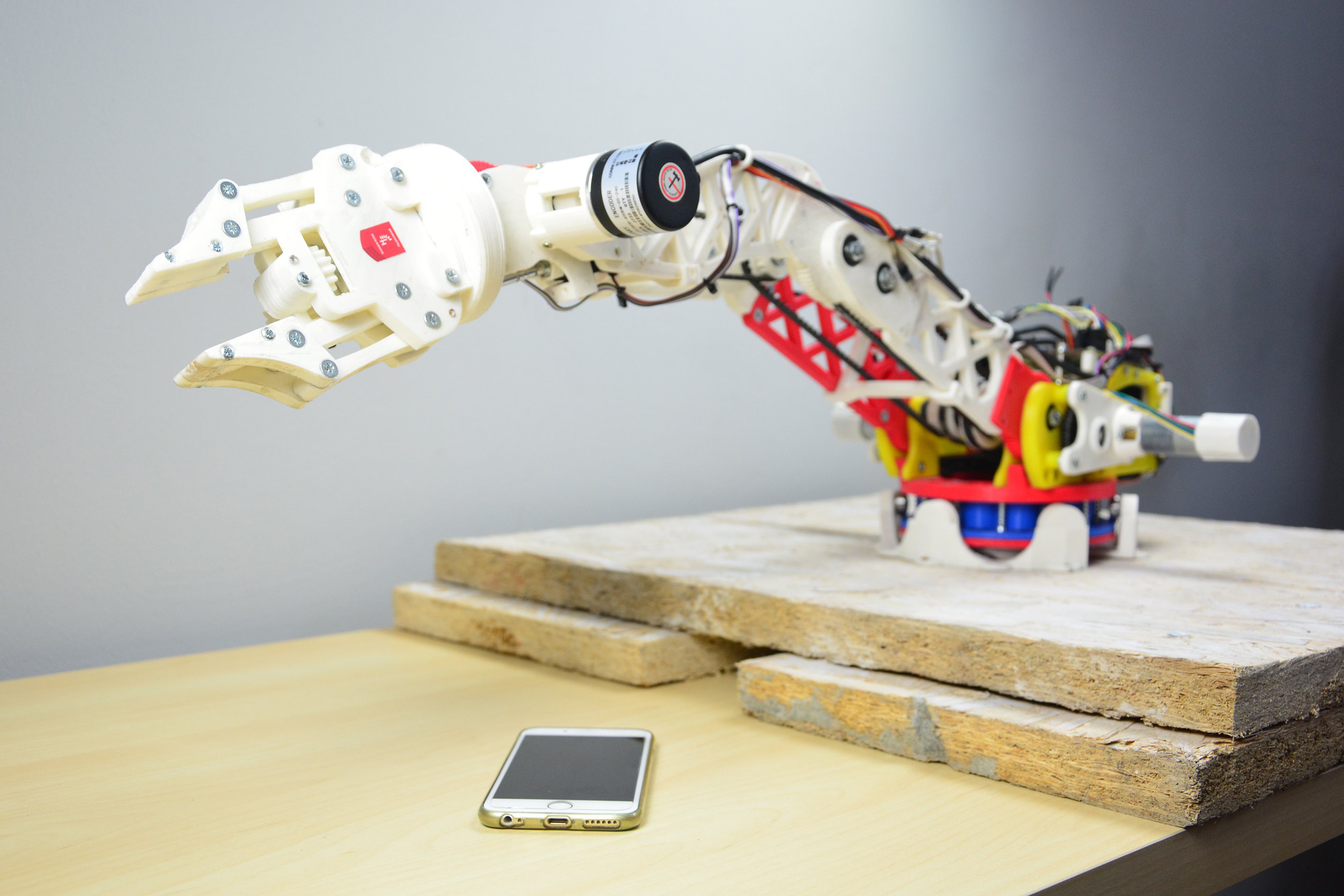
描述:它是一个具有五个自由度的开源和可打印操纵器。 该项目的主要目的是创建一个机器人手臂,可以由世界各地的制造商或学校制造,以教授机器人而不是使用模拟软件。 在垂直位置,hRobot长约700mm,可以举起高达500克的物体。
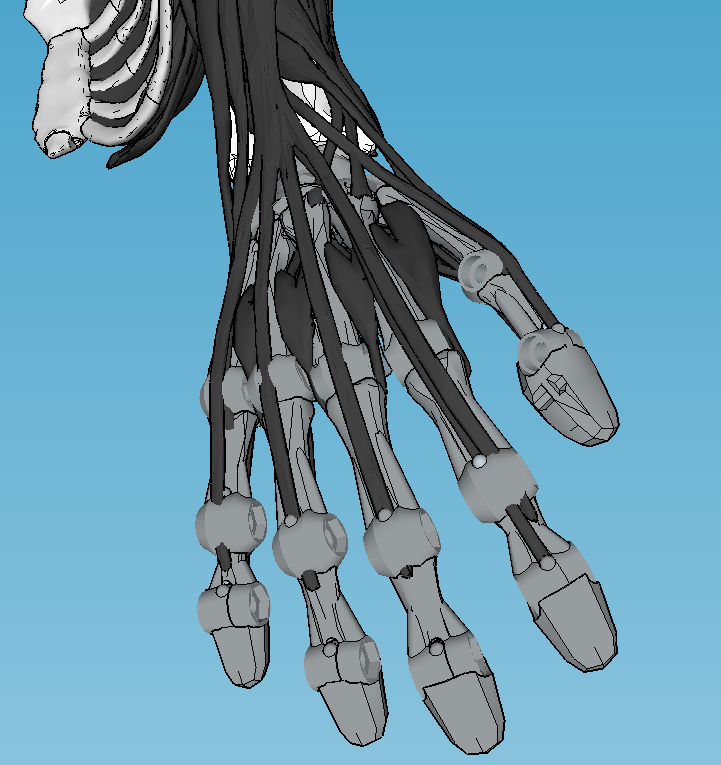
描述:3D打印,铸铝,基于解剖学的Arduino控制仿生手臂,功能和手感超越人类手臂。
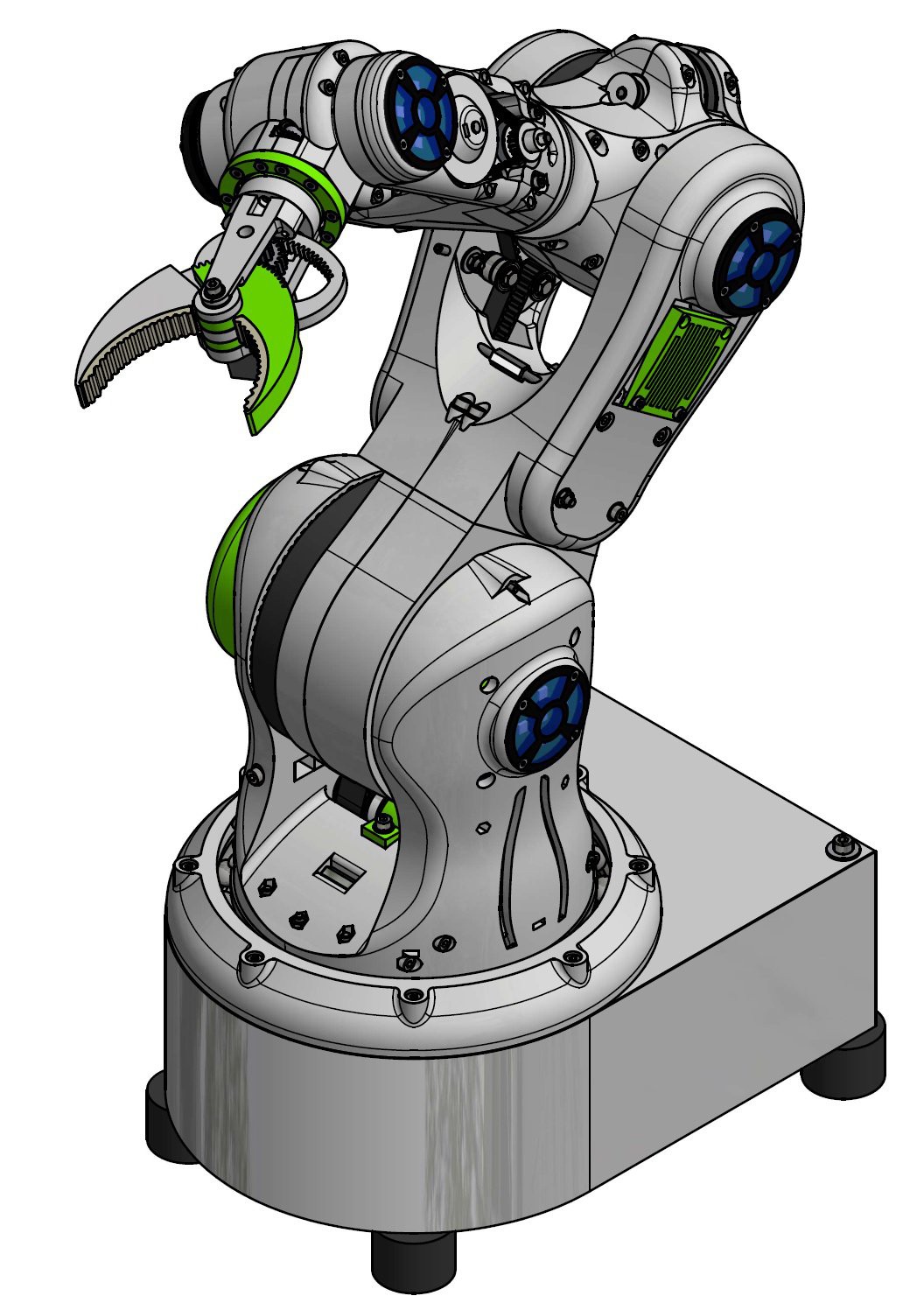
描述:我的可打印机器人手臂的灵感来自众所周知的工业机器人,但可打印。目标是开发一个开源机器人手臂,用于私人或小型企业,并为每个人提供机器人开发。

描述:具有6轴的低成本先进机器人手臂,适用于轻工业用途。
描述:该项目的目标是为6轴PUMA型臂和平行夹具创建一个参考设计,有效载荷约为16oz / .5kg,达到24“/ 60cm,零件成本低于1500美元。 这种尺寸的机器人无法实现世界统治,它足以做真正的工作:翻转由计算机视觉引导的汉堡,从地板上取下脏衣服,从3D打印机卸下零件,或者从冷却器中取出美味的饮料。
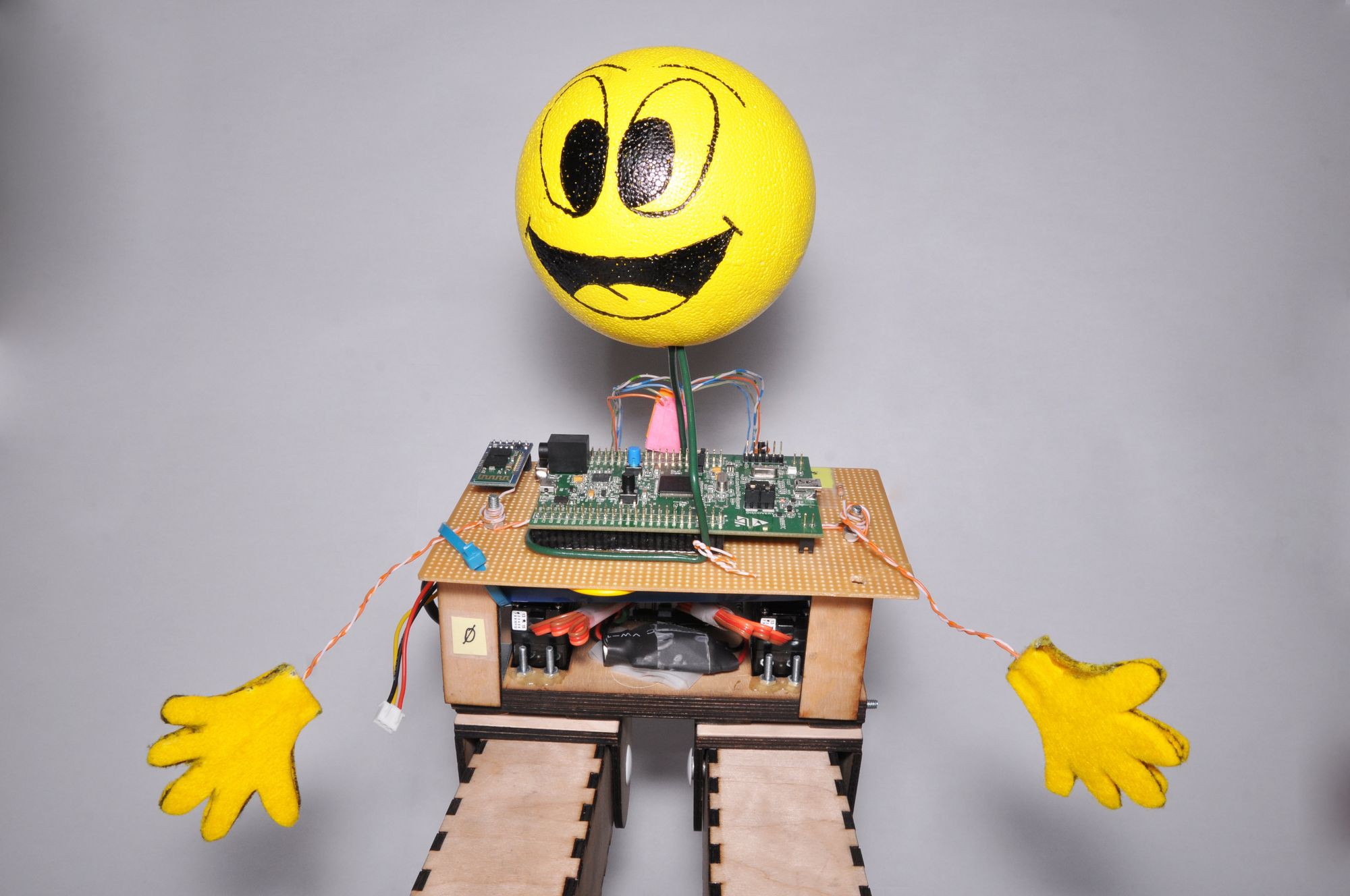
描述:多年来我一直想做一个人形机器人。 我在这里展示我的第一个里程碑 - 机器人可以直线行走。

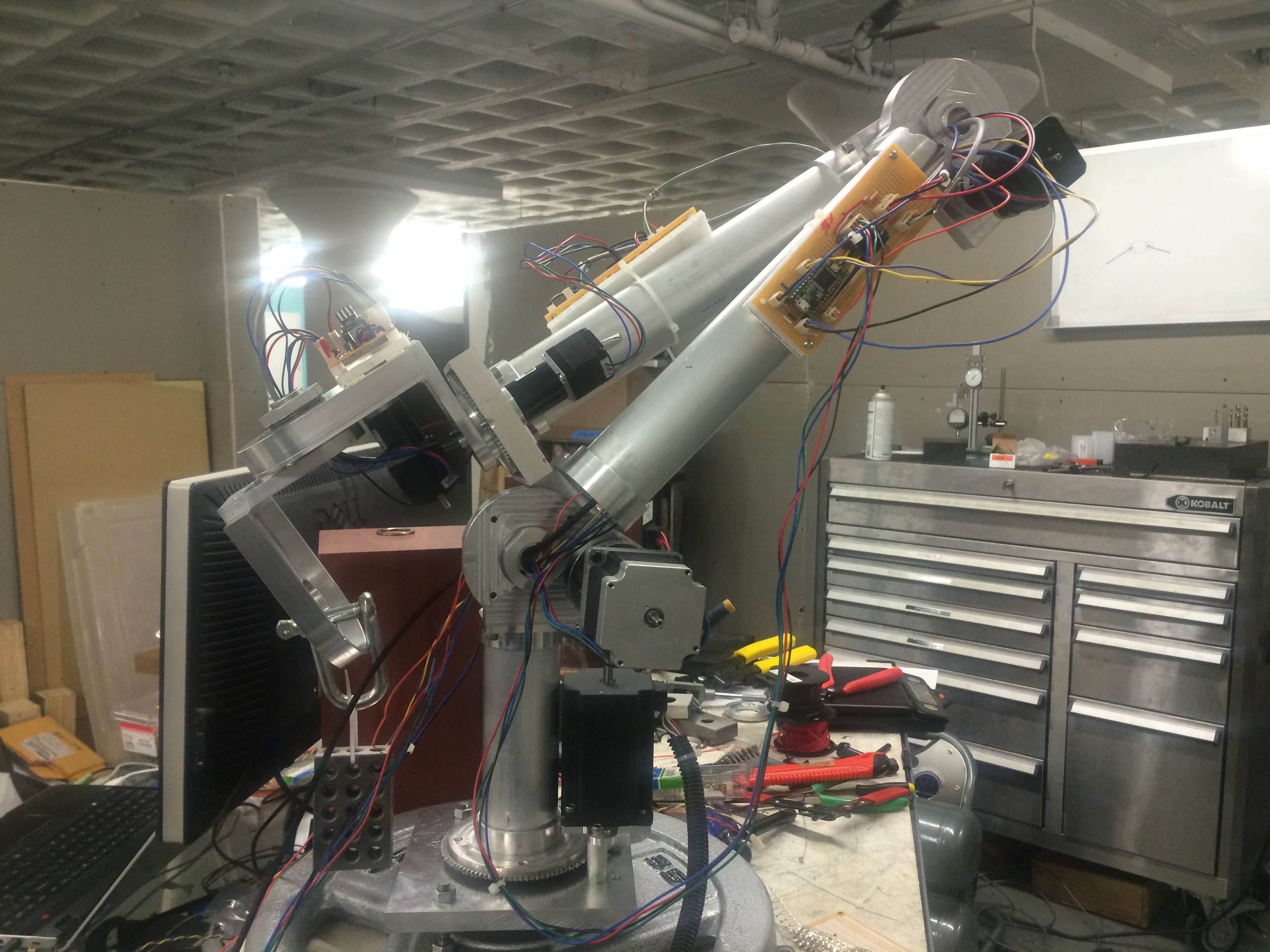
描述:这是一个大致基于ABB IRB 1400的机器人手臂。到目前为止,我的手臂基于步进电机,我想看看这个可以用爱好电机做什么。 运动学将在PC上连接到PC上,AVR对电机进行io控制。
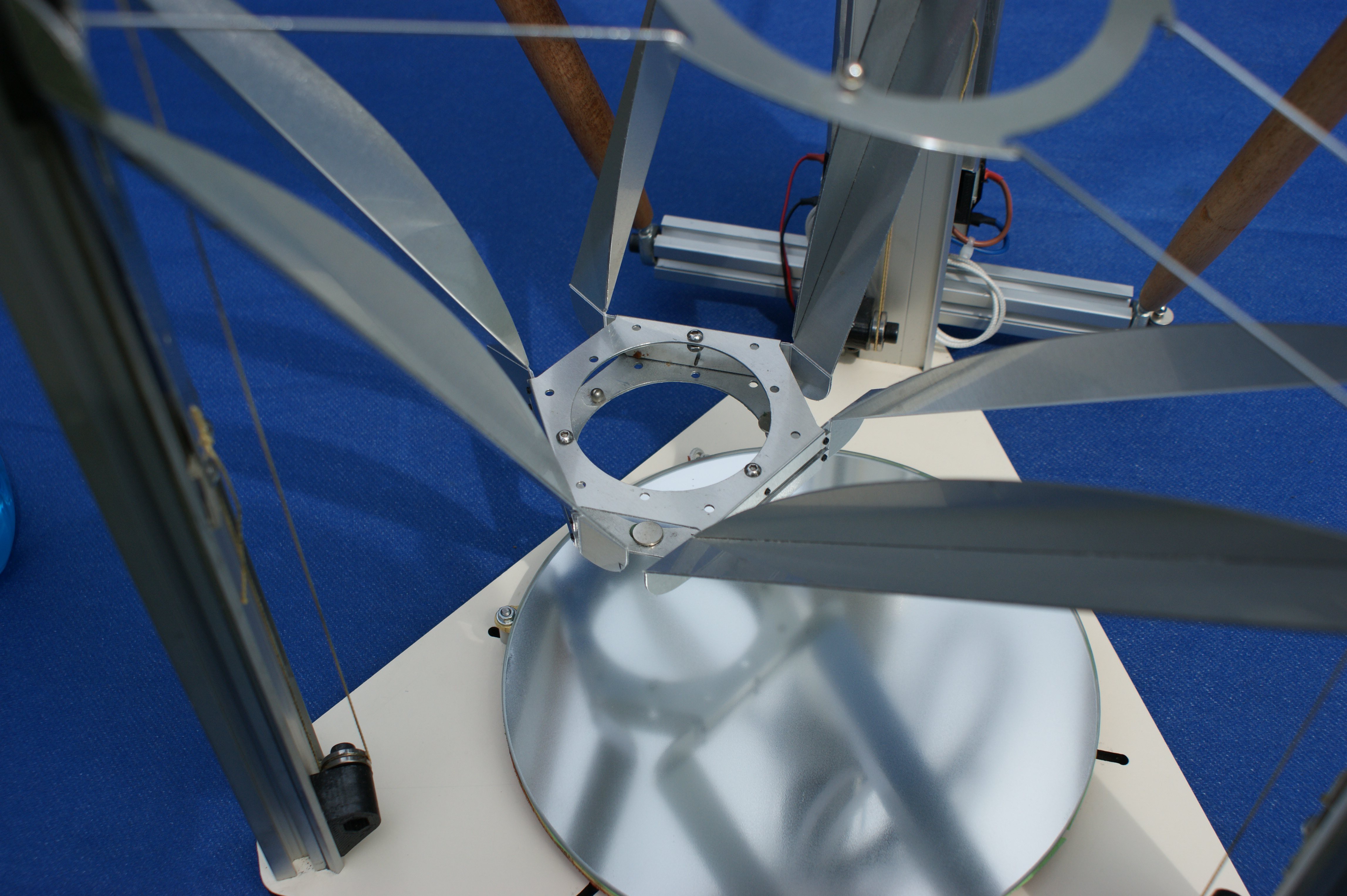
描述:曾经想创建自己的马赛克图案吗? 我说,我想要一个瓦片后挡板,我想要一个机器人!

描述:廉价的机器人手臂,改装了H桥电机控制器和闭环控制。

描述:灵活的开源机器人手臂,可以研磨,倾倒和提供最好的机器人酿造咖啡。

描述:为制造商和小企业构建开源机器人手臂。
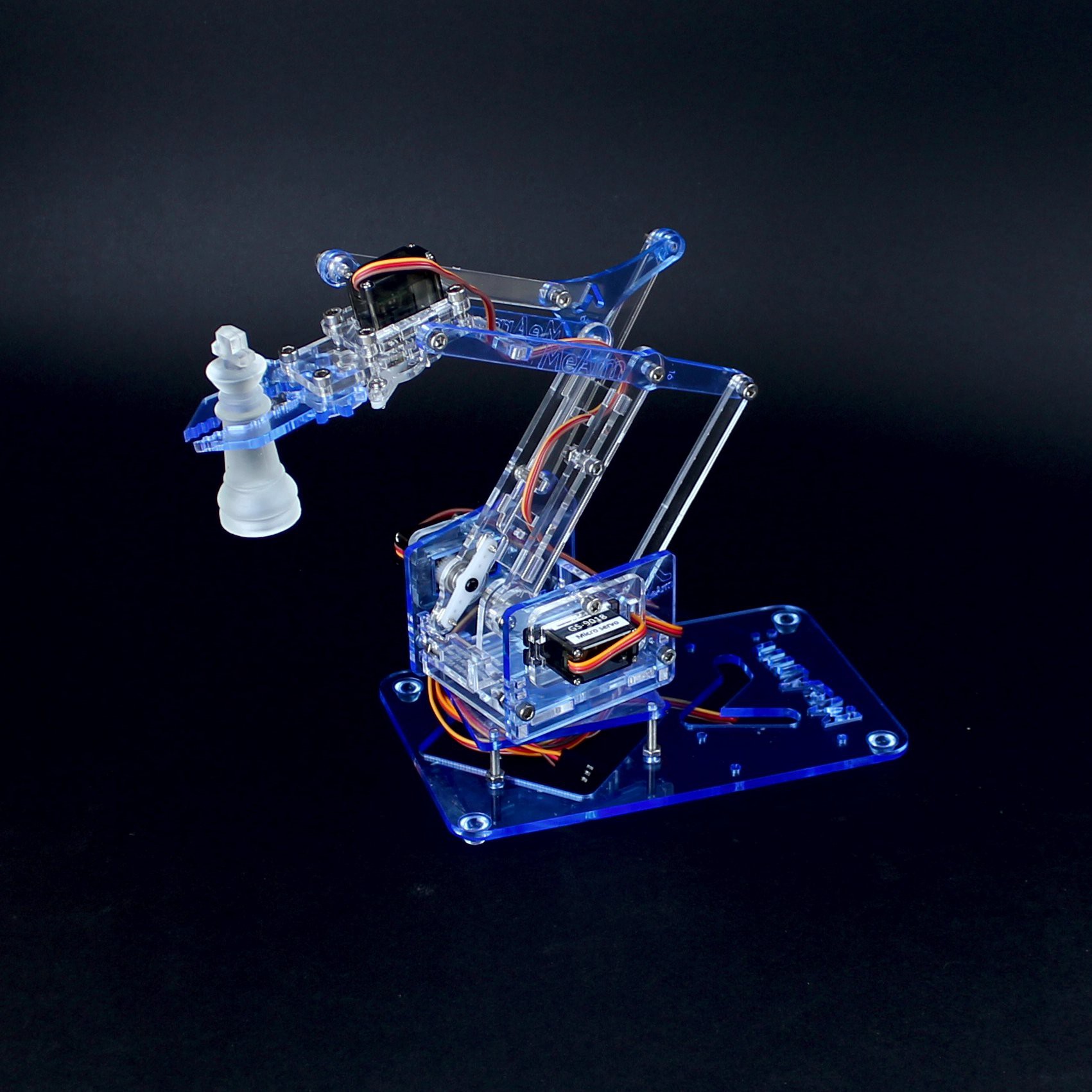
描述:MeArm项目旨在将简单的机器人手臂带到普通教育者,学生,家长或孩子的范围和预算之内。 我们提出的设计简介是使用标准的低成本螺钉,低成本伺服电机和使用小于300 x 200mm(~A4)的丙烯酸制造完整的机器人手臂套件。MeArm项目不同的地方在于它试图解决的问题不是关于机器人问题,而是关于让人们进入科学,技术,工程,艺术和数学或STEAM。 参与这些STEAM活动的人越多,我们就越有可能解决所有生活中的问题,从癌症到人类到火星。
评论
0 / 100
查看更多
 Lucia li
Lucia li2019-08-13
1488

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号