Hackaday上的项目汇总-机器人项目
收藏
分享
脑图
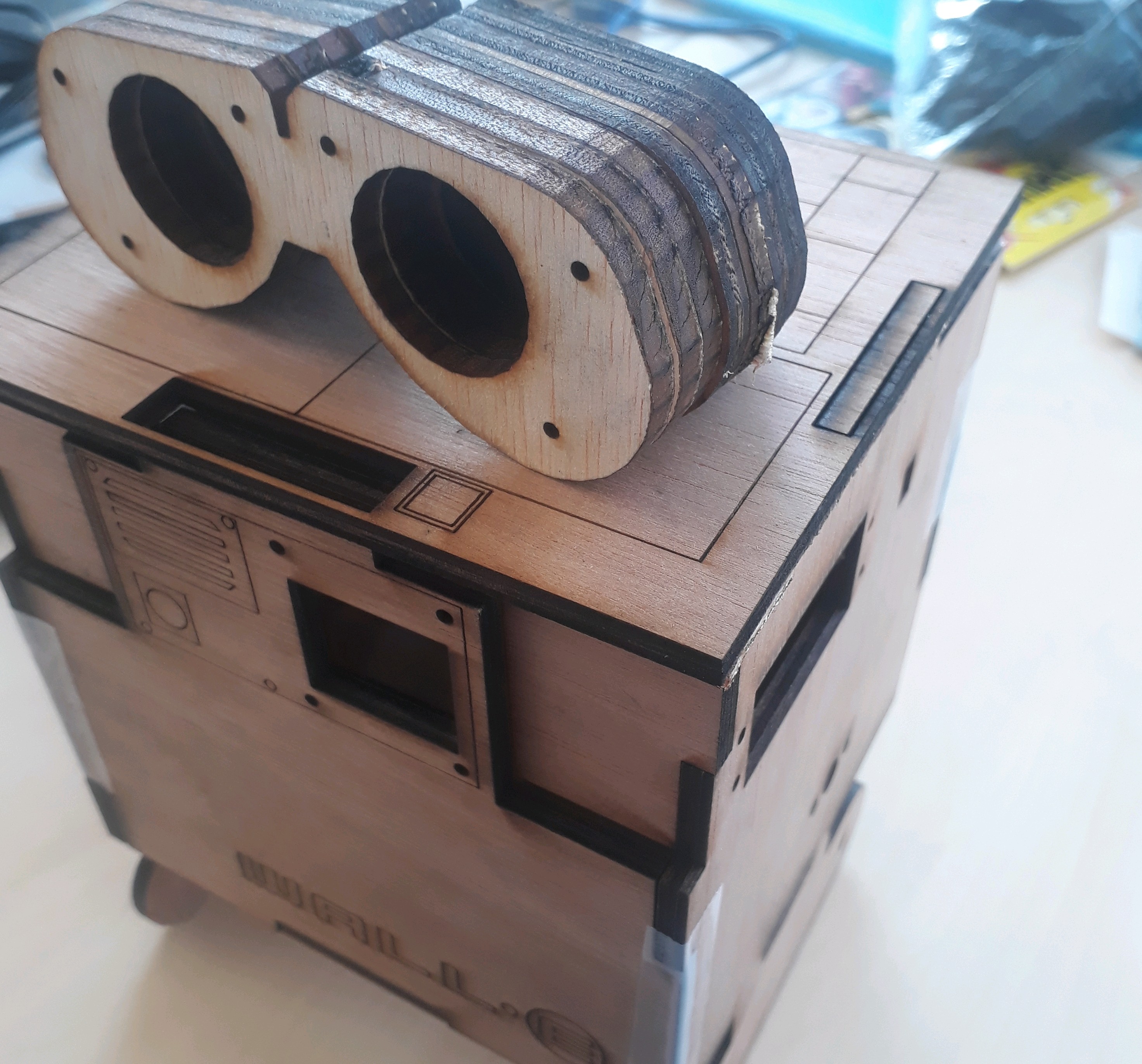
描述:小型,低成本的Wall-E机器人。 通过WiFi websockets从HTML5界面进行远程控制。

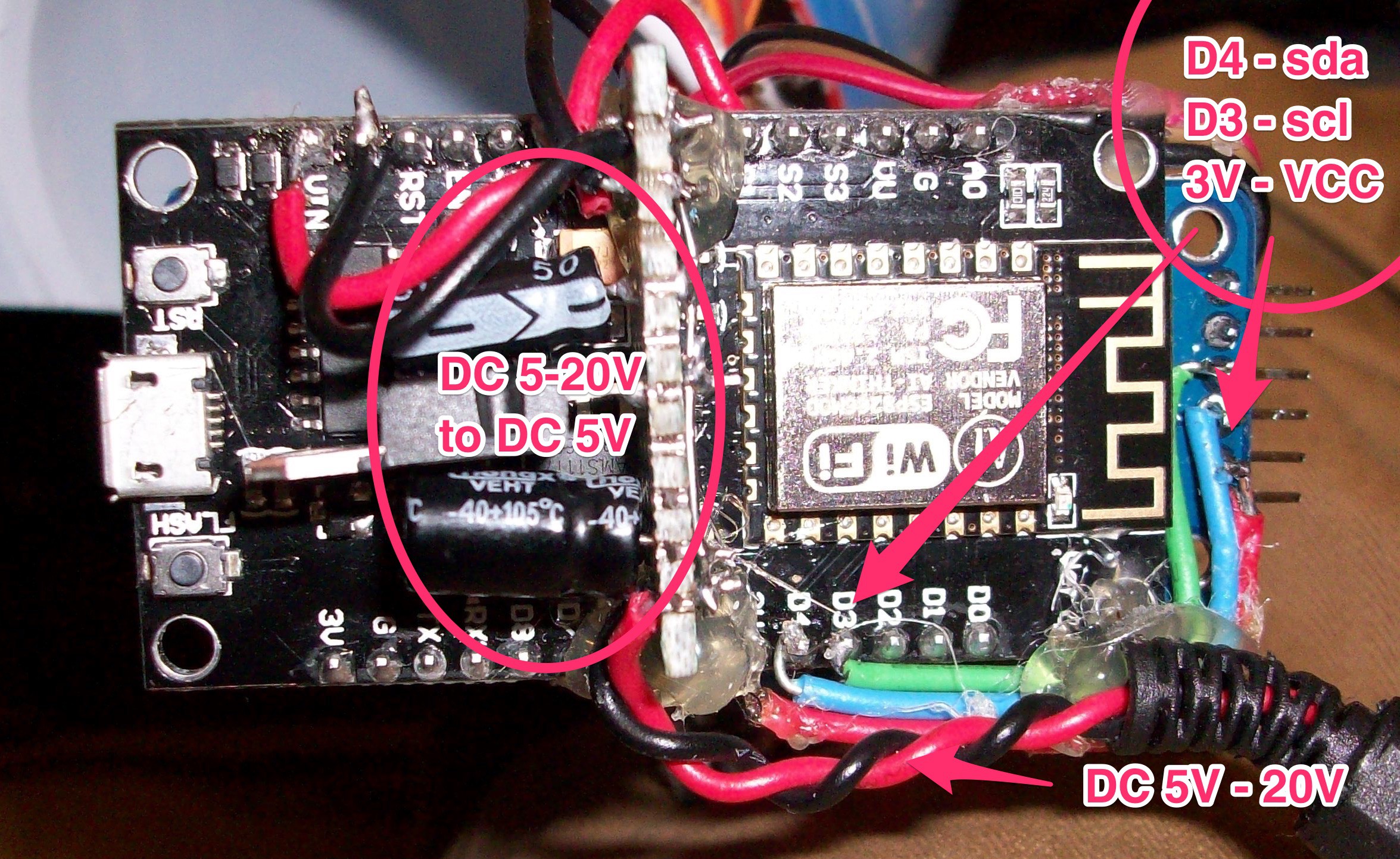
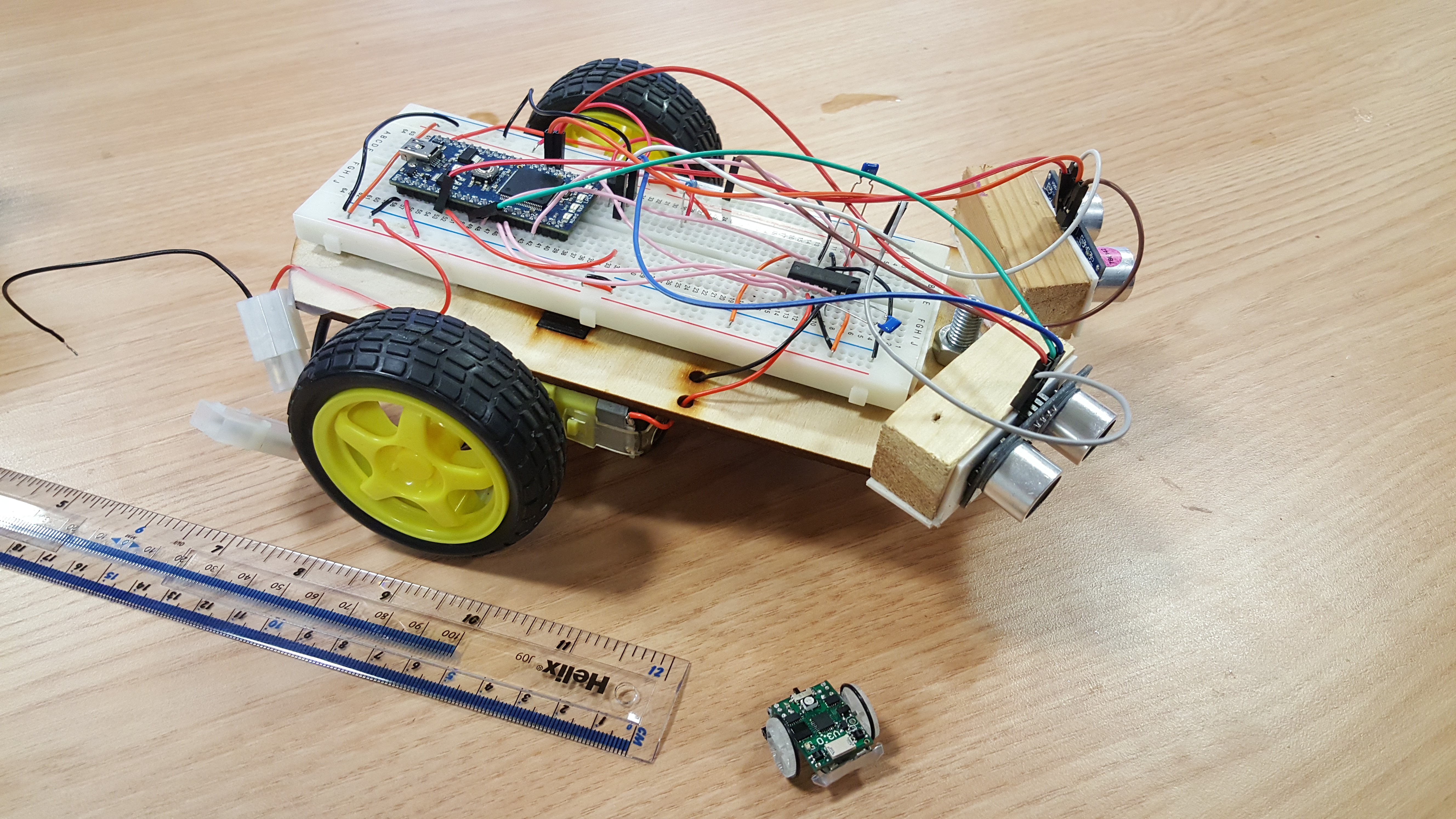
描述:建立一个智能手机的机器人汽车的核心。

描述:正在创建Abot,以帮助机器人爱好者,制造商,学生自己以经济,简单和有趣的方式构建可扩展的机器人手臂。
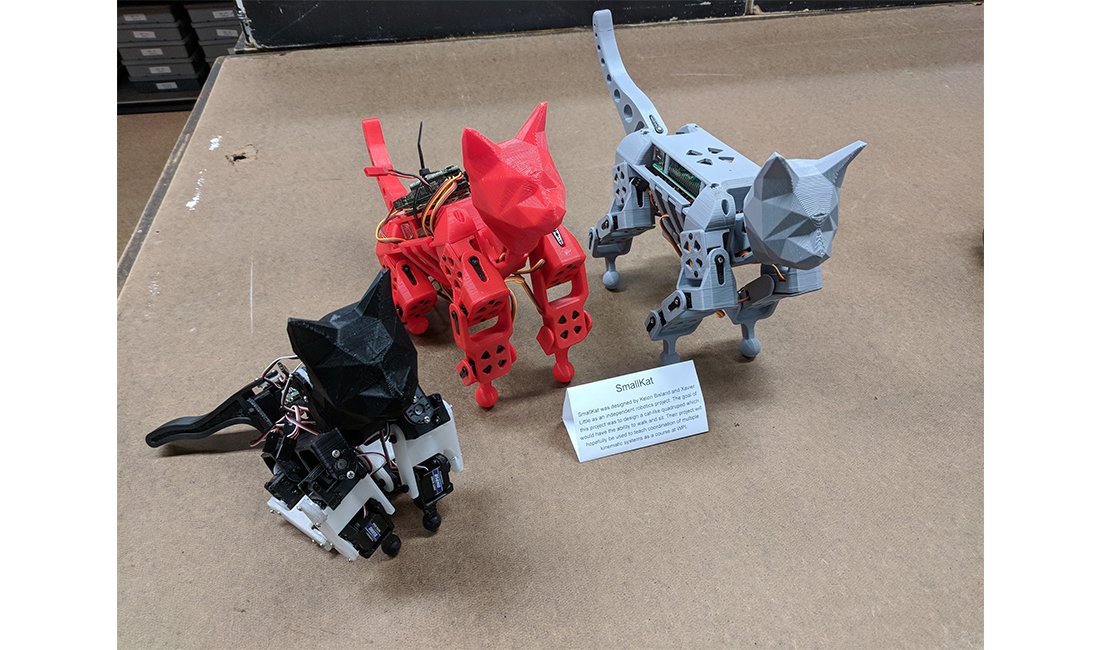
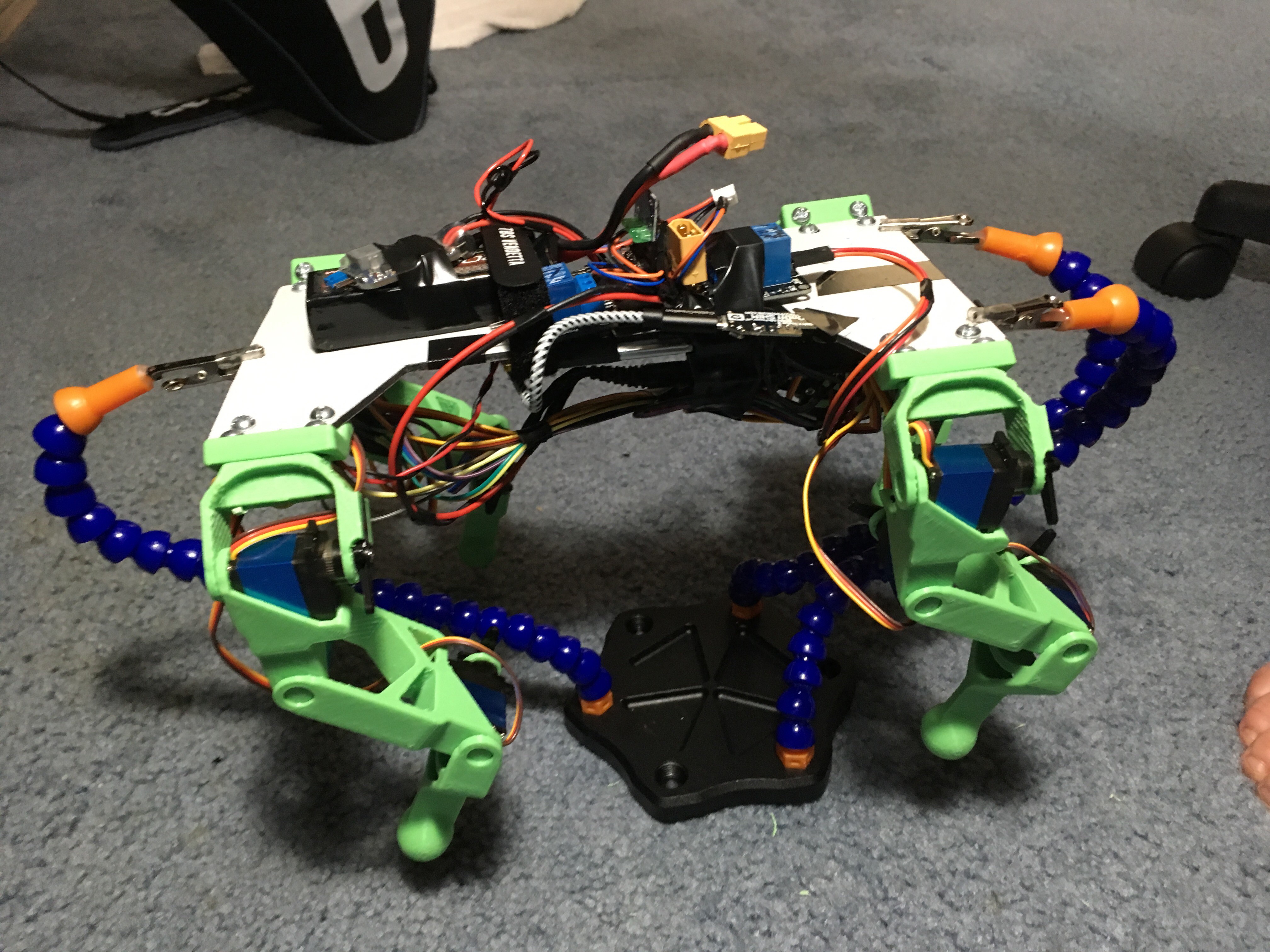
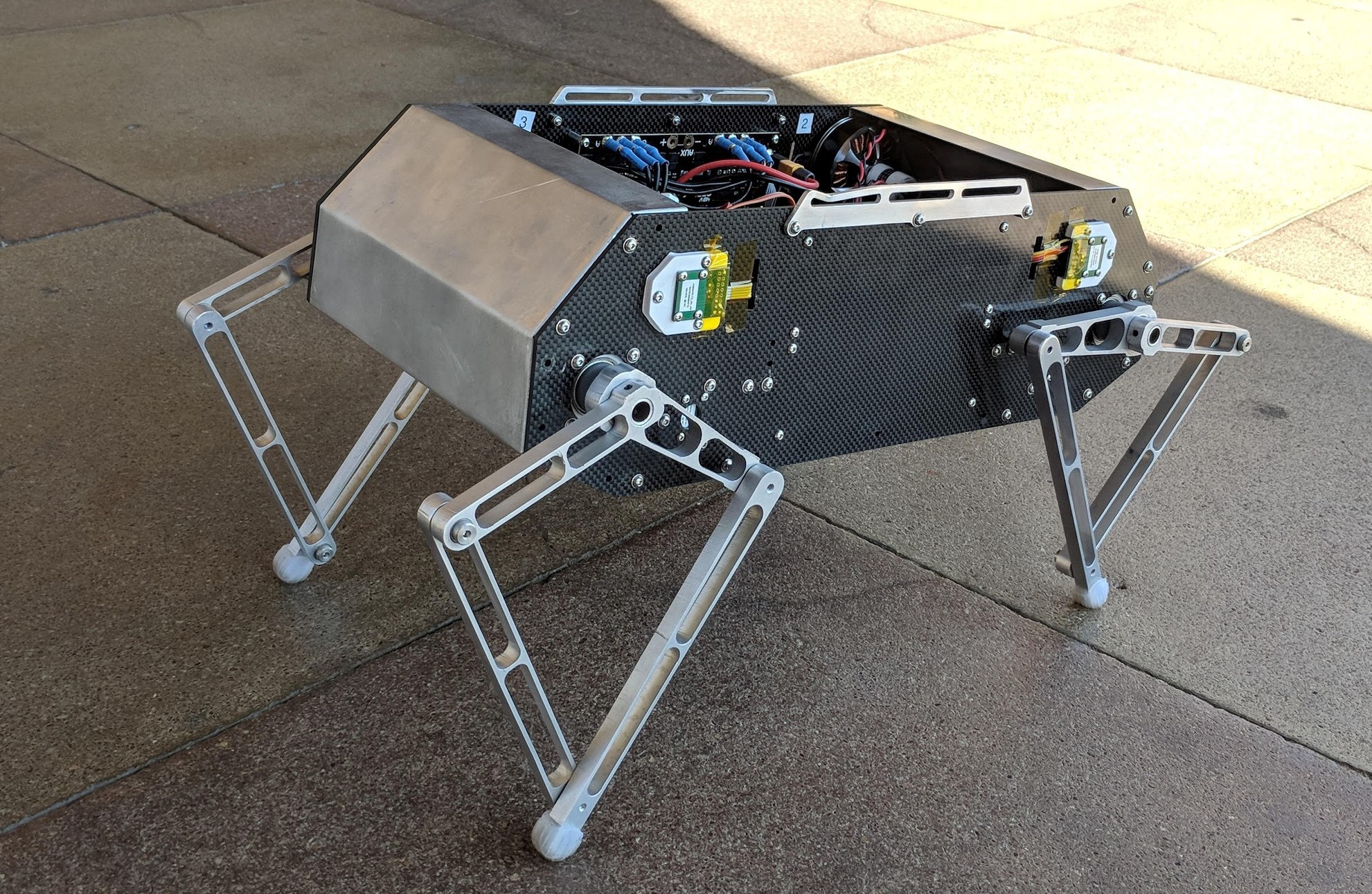
描述:面向动力学的四足动物用于研究和教育。 Smallkat提供2种不同的控制选项。
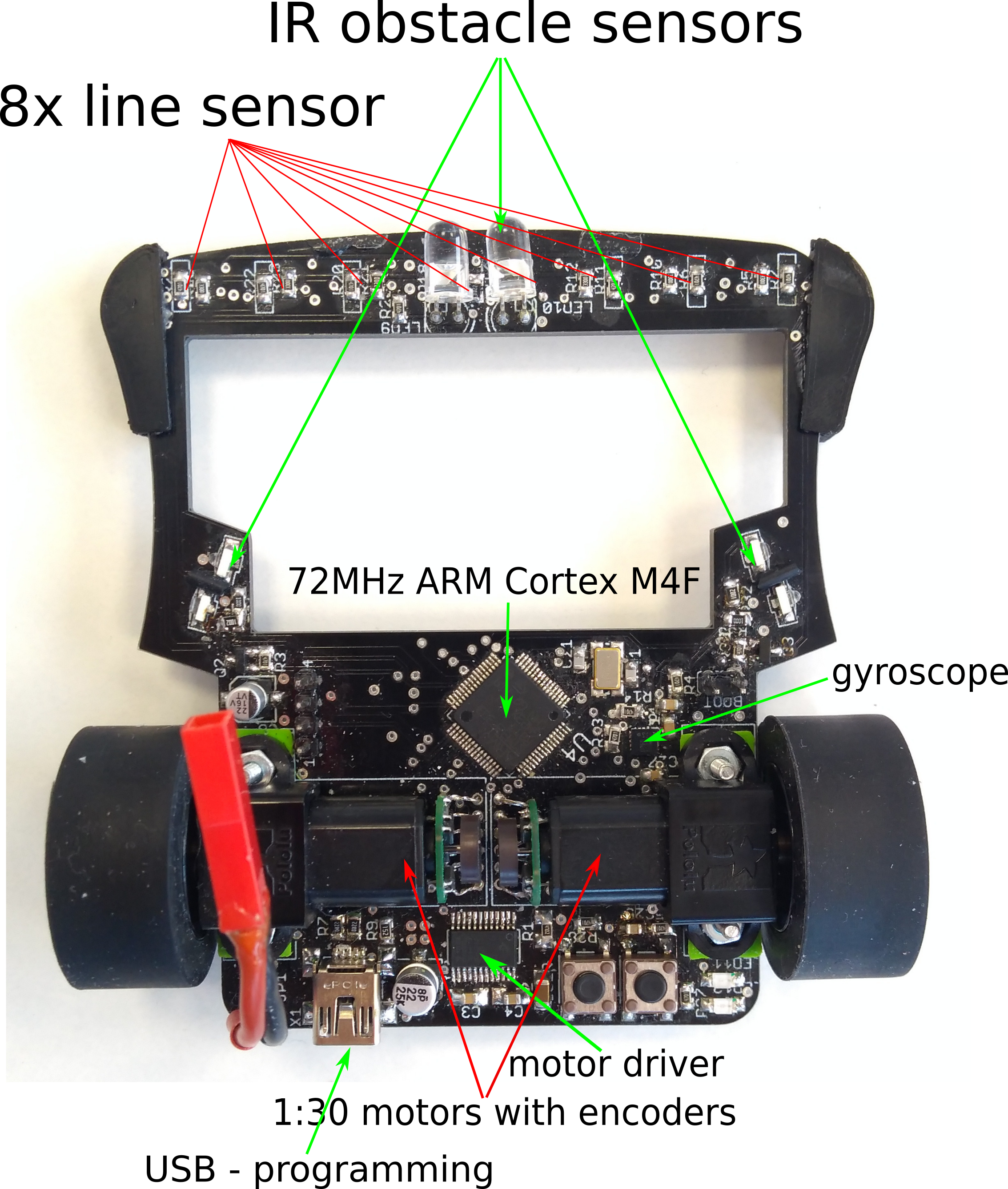
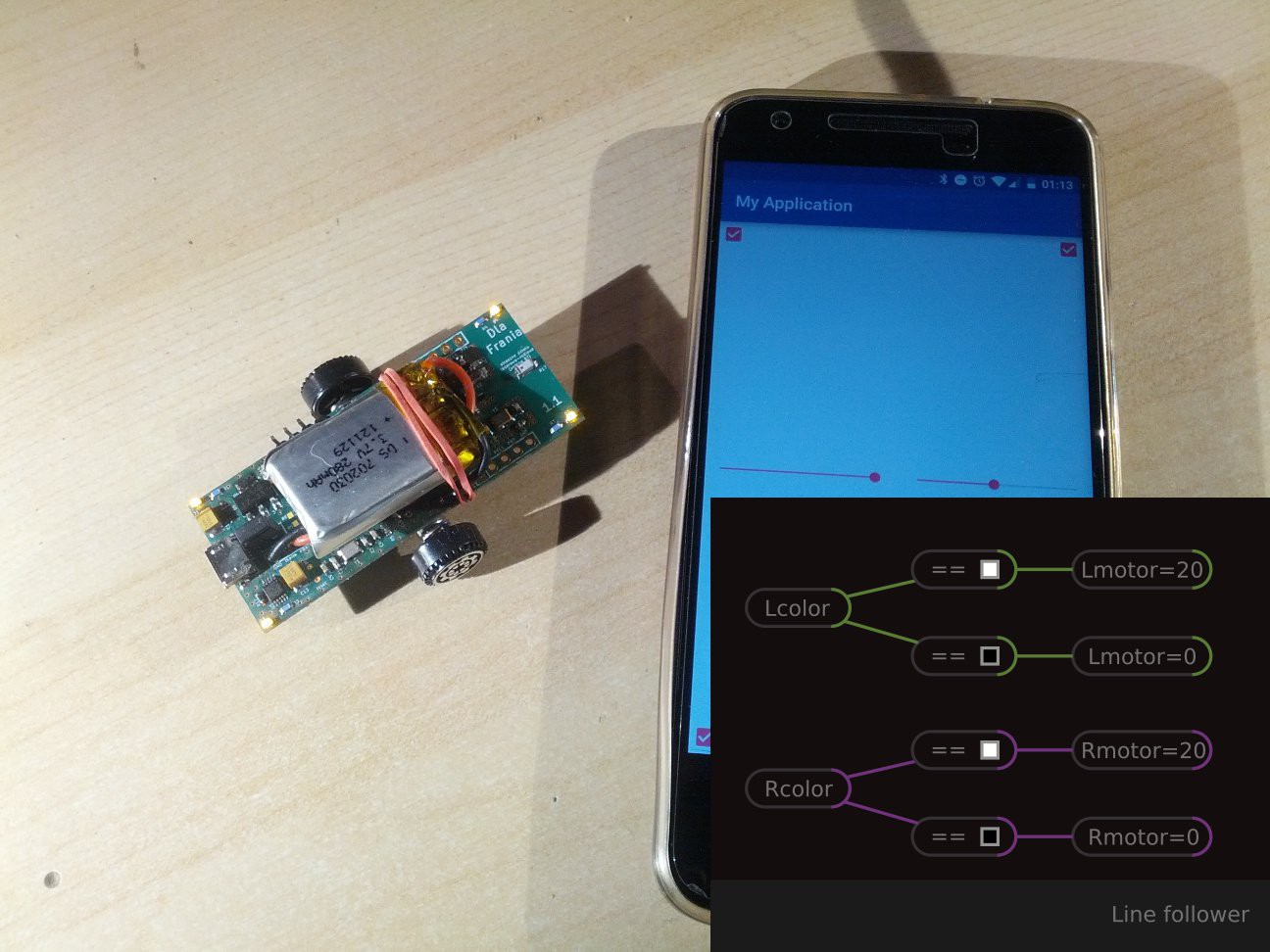
描述:线跟随机器人,使用深CNN预测曲线形状以正确估计速度。
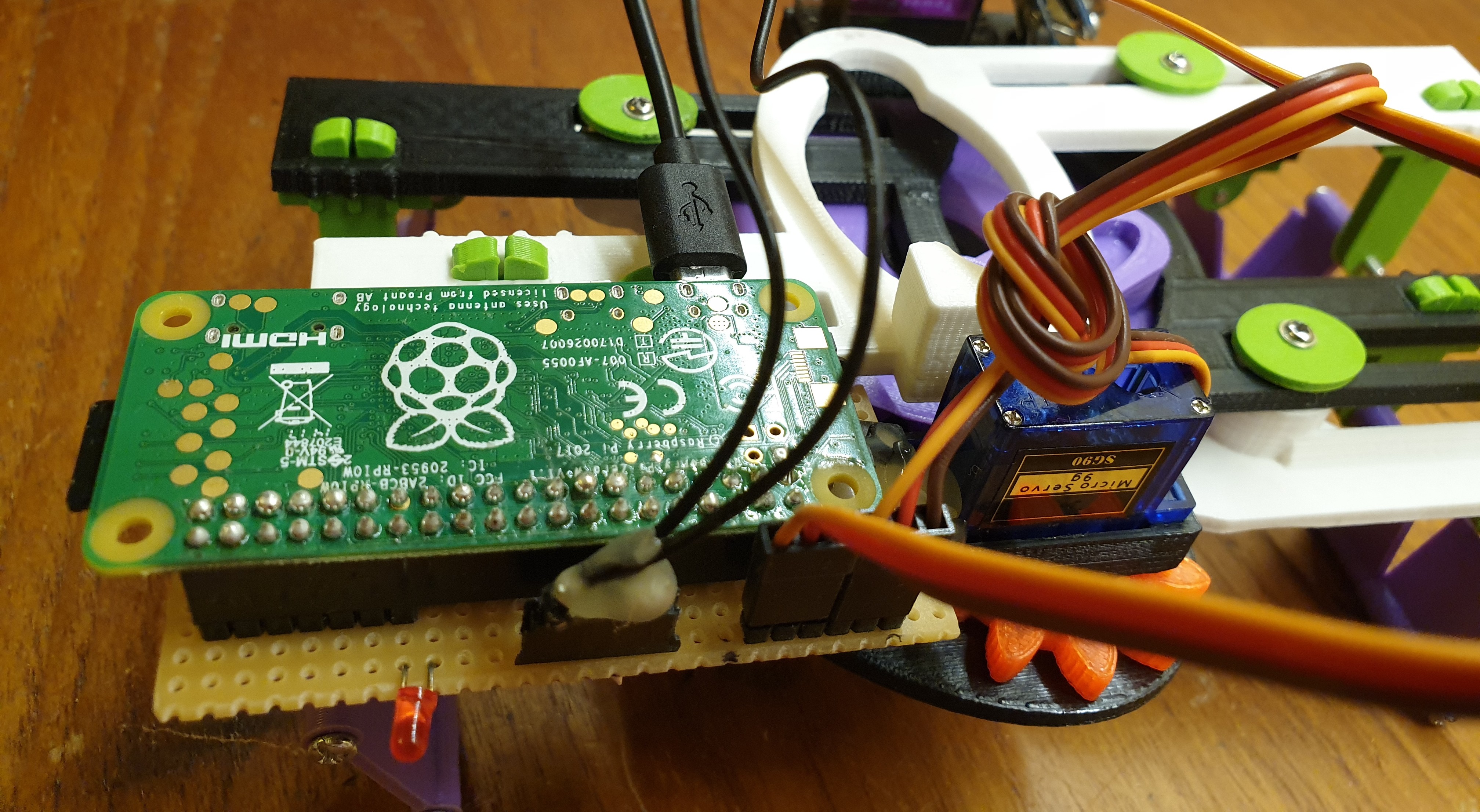
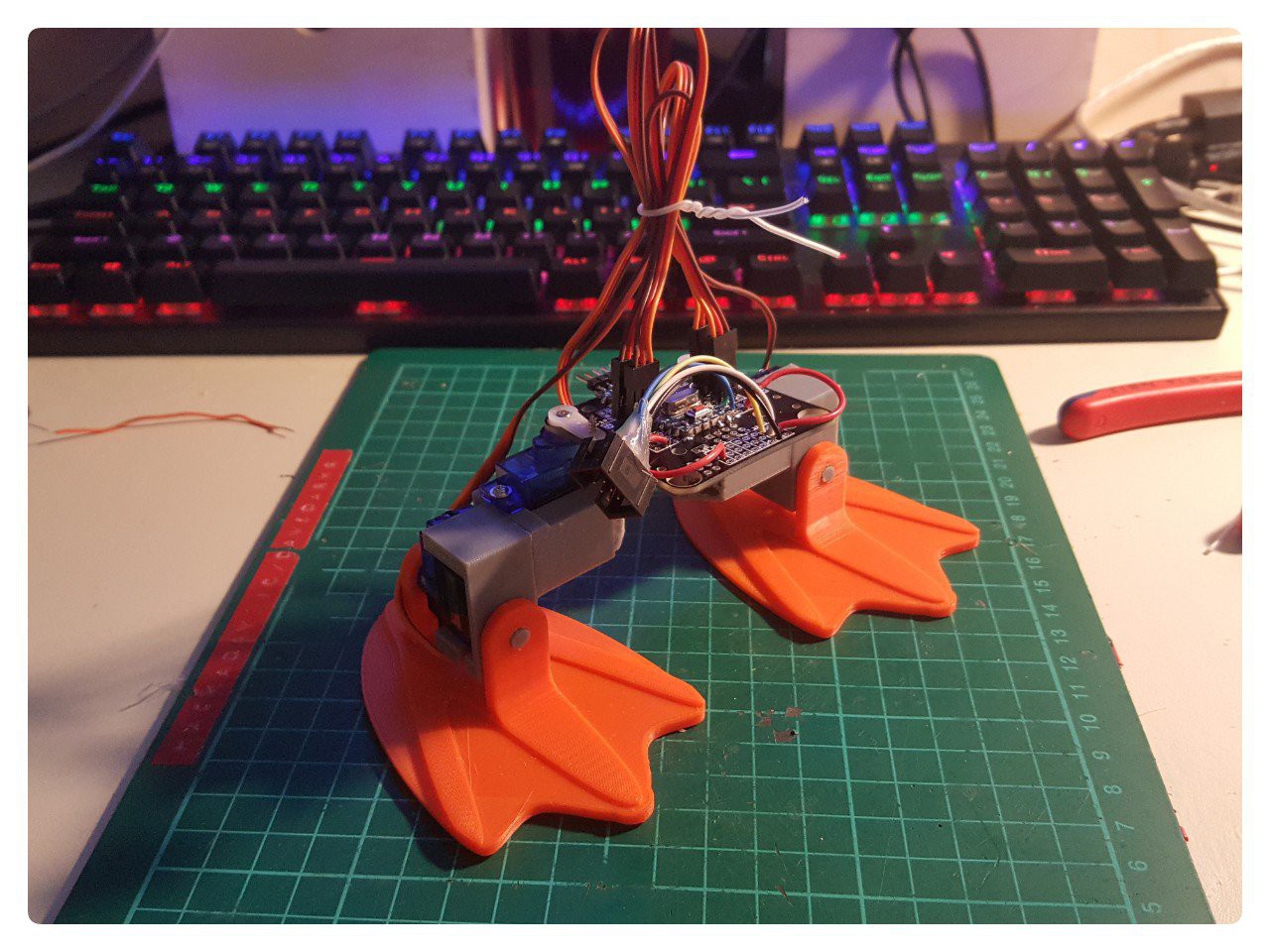
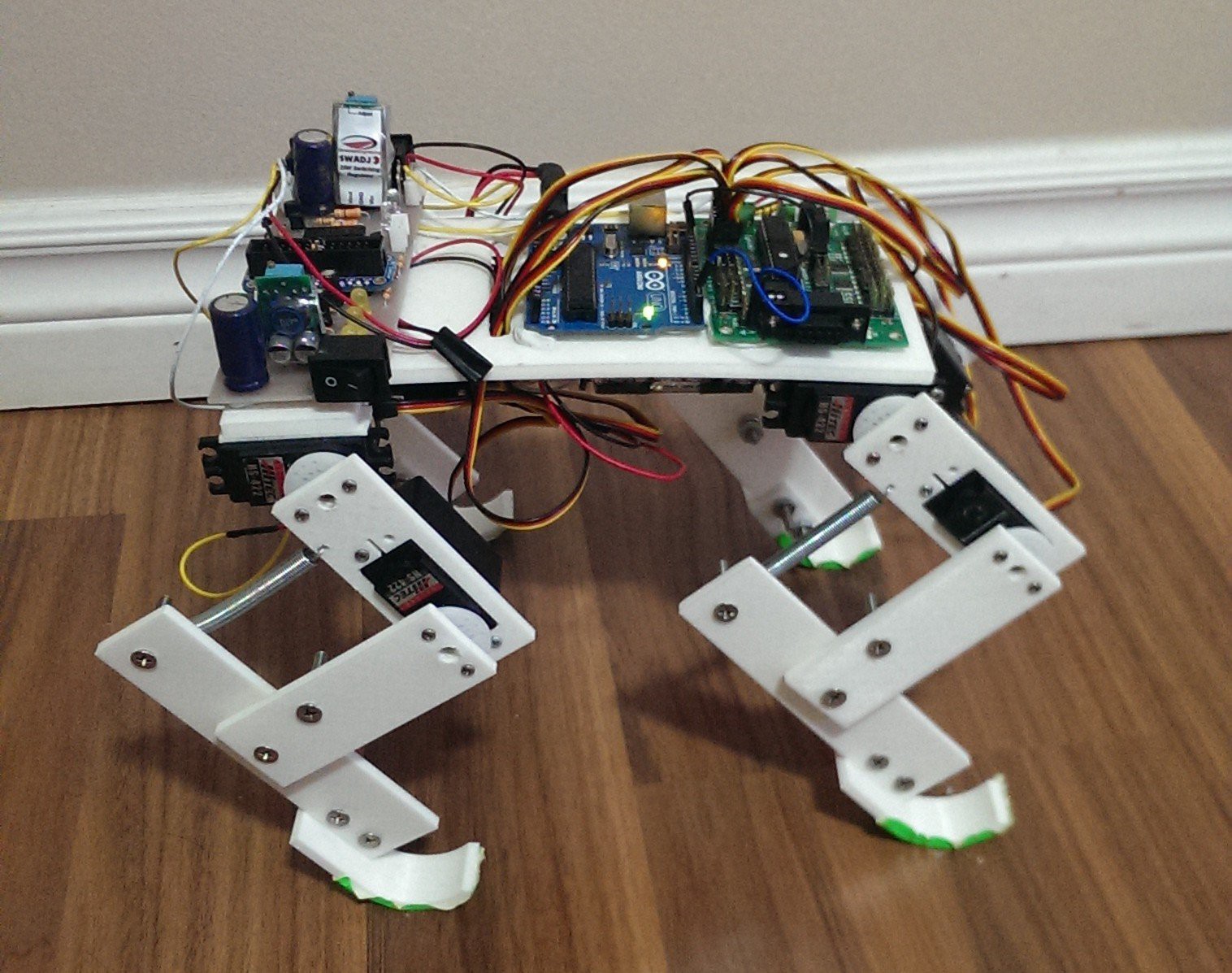
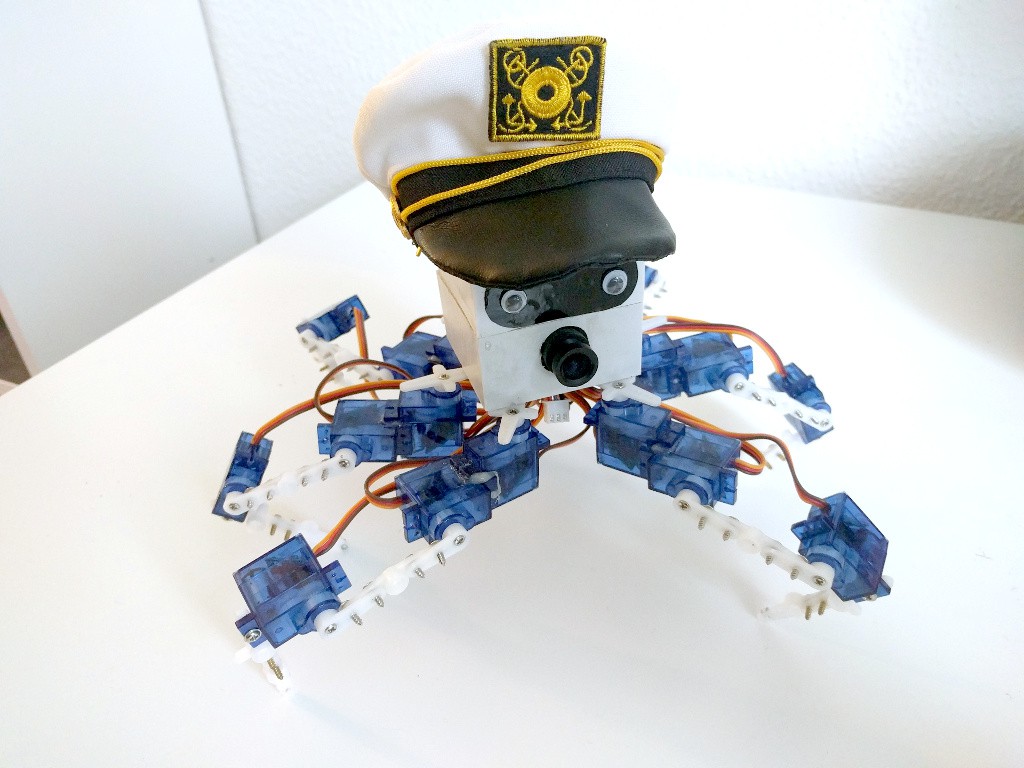
描述:我正在设计一个只能使用两个伺服电机的3D可打印四足动物。 一个伺服用于向前移动而另一个用于转向。希望它易于构建和控制。 还具有机动性,能够清除轻微的障碍物和不平坦的地形。

描述:一个雄心勃勃的移动机器人,用于测试我的技能和学习新技能。
描述:丑陋的细菌启发机器人雕塑。 在避开物体的同时搜索光线。
描述:四足机器人使用廉价伺服闭环控制和力感应电阻器进行地面力反馈。 使用Teensy和PCT。

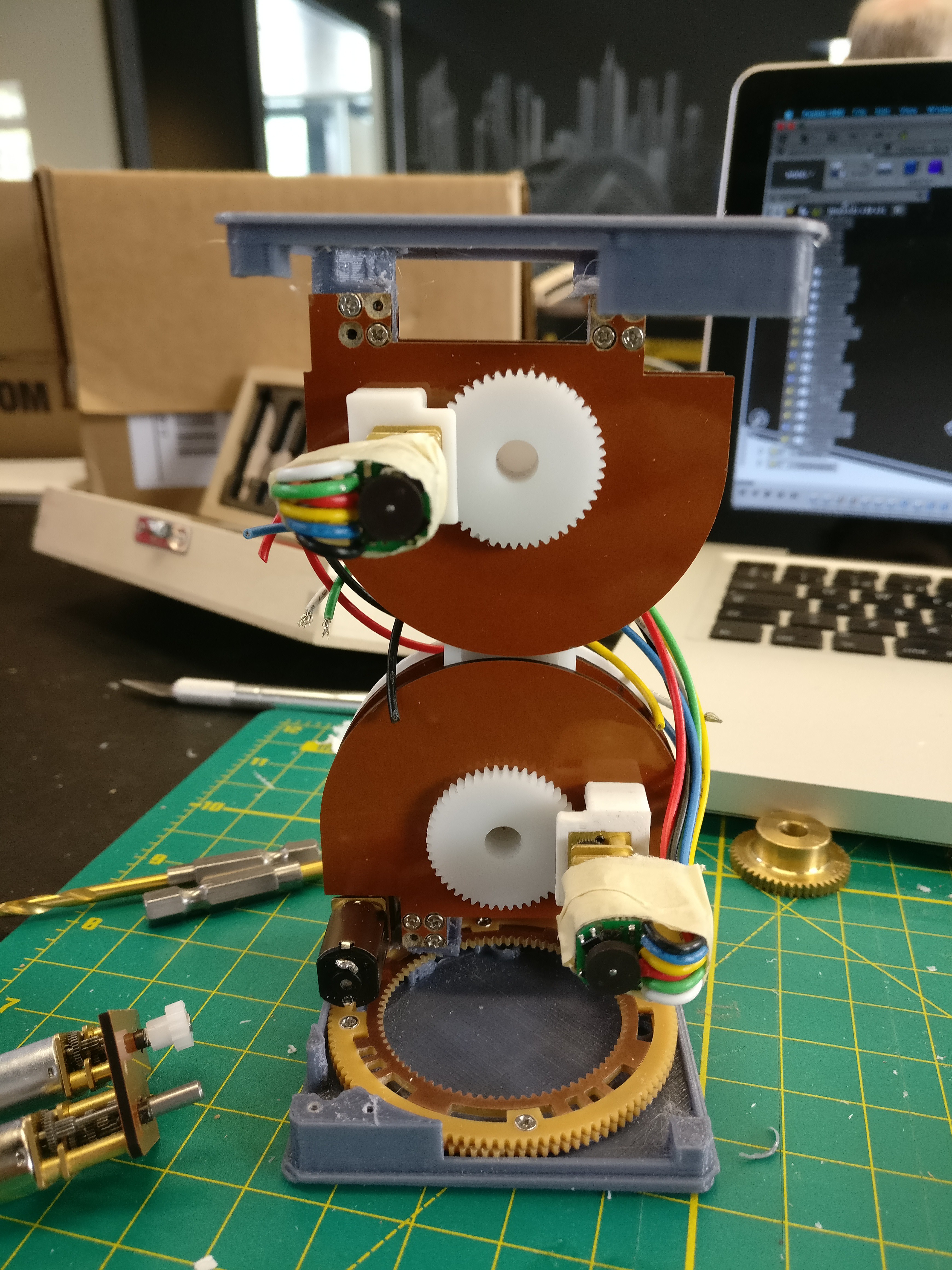
描述:高速高扭矩机器人执行器,采用低成本无刷电机,定制控制器,3D打印部件和轴承。
描述:在Raspberry Pi上用Python编写的定制3D打印腿和运动软件的四足动物。

描述:DogBot项目旨在证明您可以以1000美元的价格建造一个可以在人类规模的世界中工作的步行机器人。 随着3D打印的成本降低,零件生产下降,无刷电机和短期电子产品价格下降且容易订购,应该可以制造一些东西来竞争波士顿动力公司的现货或麻省理工学院的猎豹,而没有价值10万美元的价格标签。
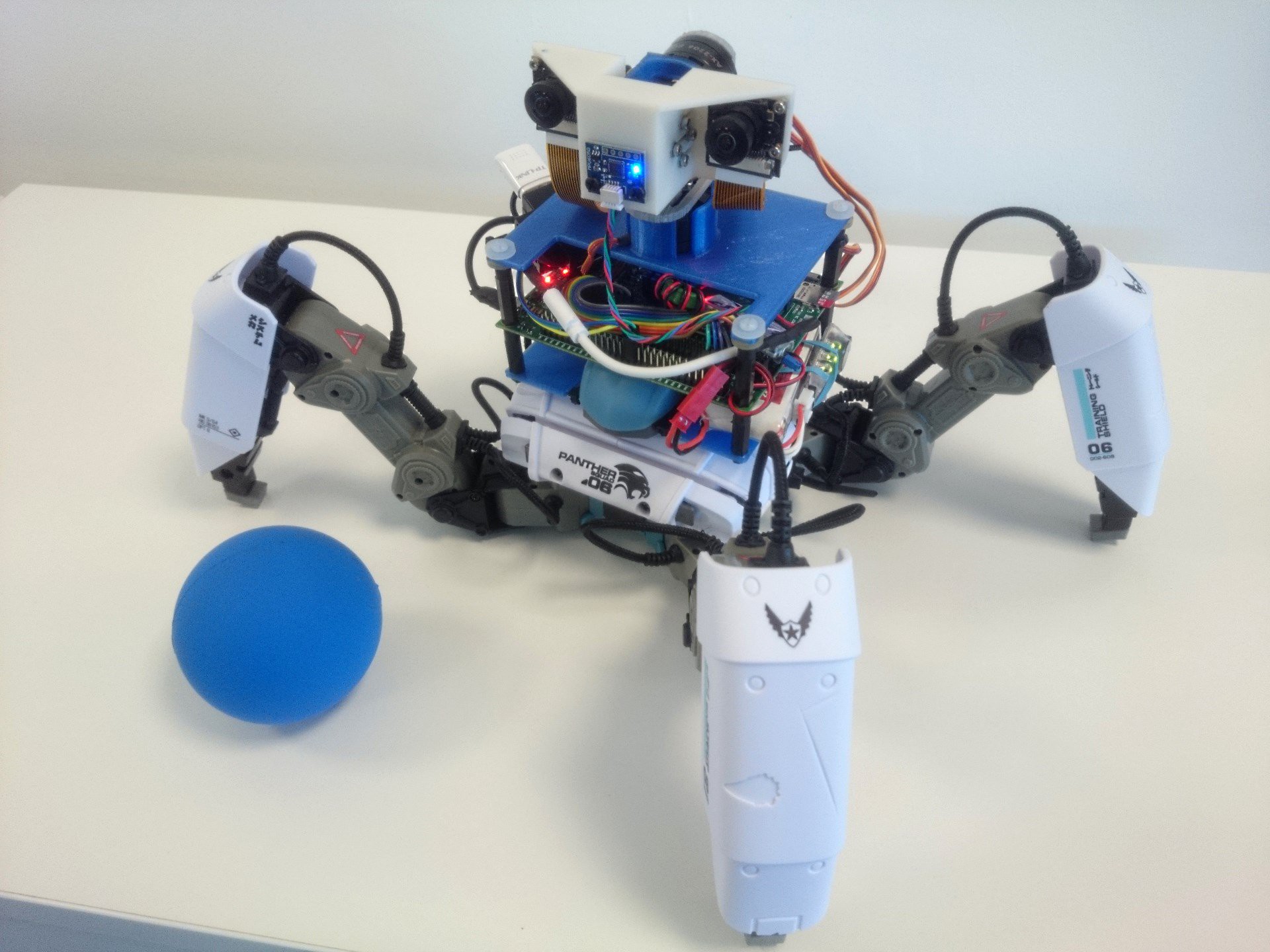
描述:使用蓝牙控制Mekamon机器人,并使用Pi和自定义摄像头为其提供自主行为。
描述:通过CNC雕刻一种特殊的复合材料Hylite来制造折叠和铰链。 如此制作的Zatsit在Kickstarter上直到2018年8月5日。

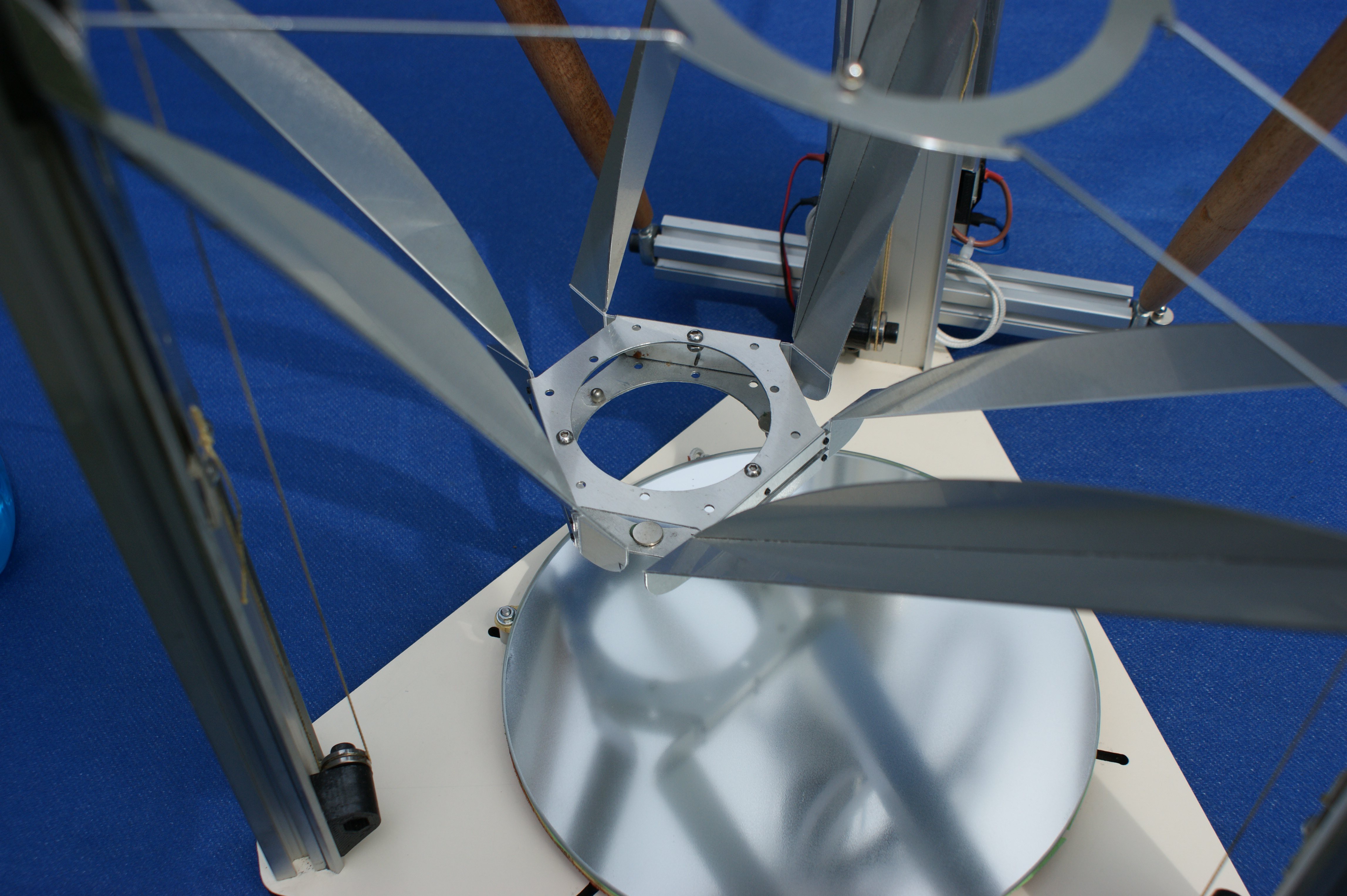
描述:油漆肖像的自动机器人。
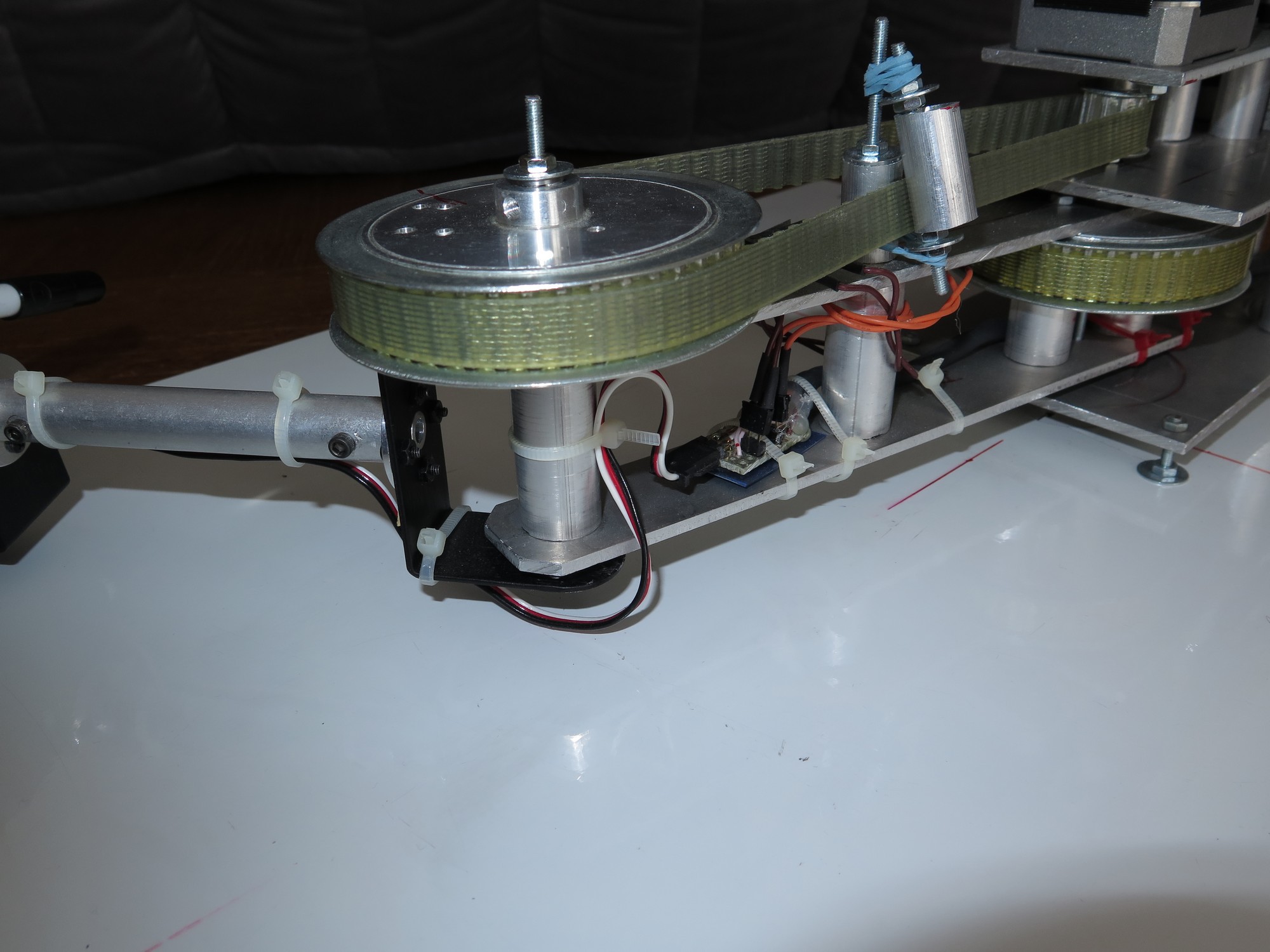
描述:这是一个完全由我自己设计的划线机器人。 它使用2个精确的步进电机用于肘部和肩部。 手腕采用简单的伺服制造。 机器人可以使用2个工具:一支笔和一支橡皮擦在笔的对面。 字体是100%自制的矢量字体。 机器人从ASCII文件写入。 提供所有设计文件(代码),它是开源的。
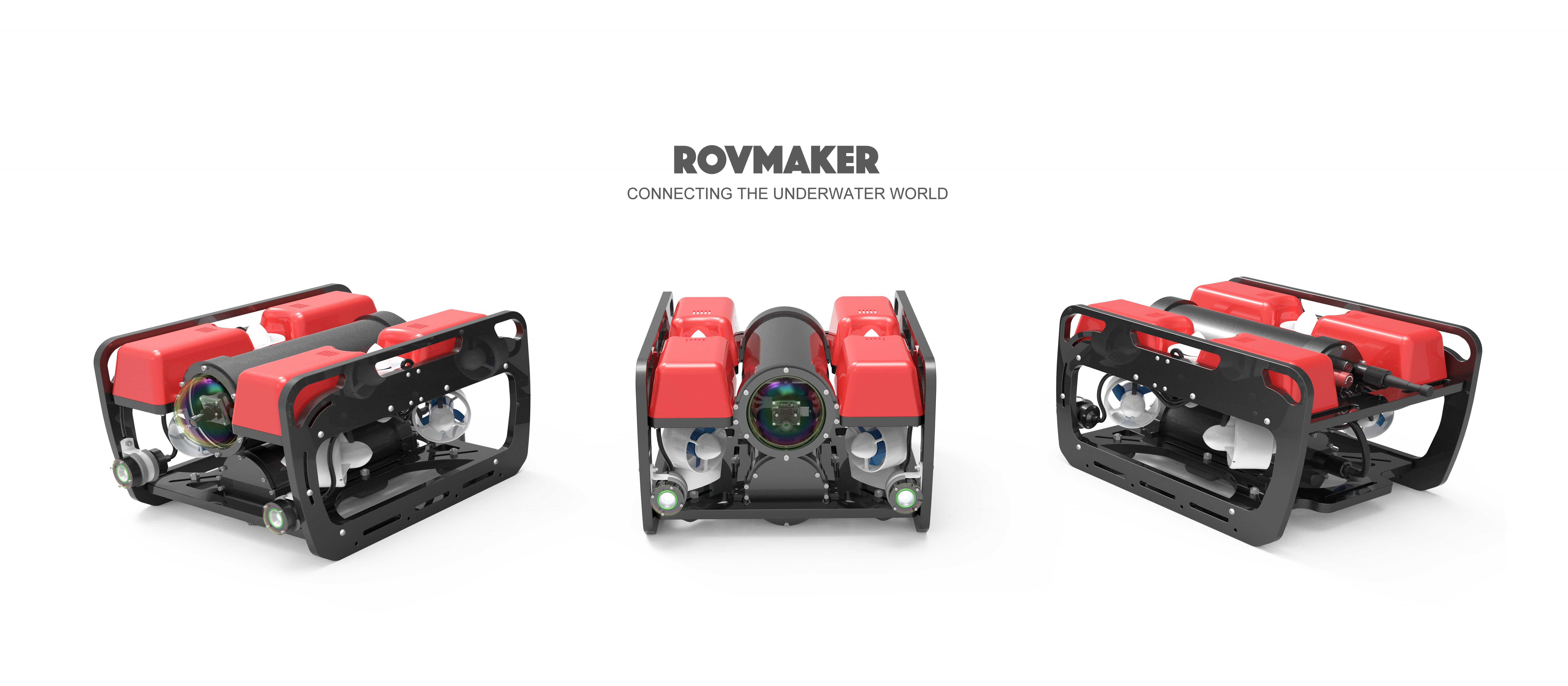
描述:制作探索海底世界的工具,激励每个人成为DIY海洋探险家。 ROVMAKER项目。 基于Ardusub。
描述:高速原型制造两足步行者,需要看起来像即将推出的SW EP8中的porg.

描述:Otto LC是Otto DIY机器人的底盘,可以使用激光切割机(通过LC)制造。 它主要用于从胶合板上切割,但也可以用其他材料制成(可能需要稍微调整一下)。 除了原始机箱的功能外,它还允许安装模式开关以循环通过不同的程序。
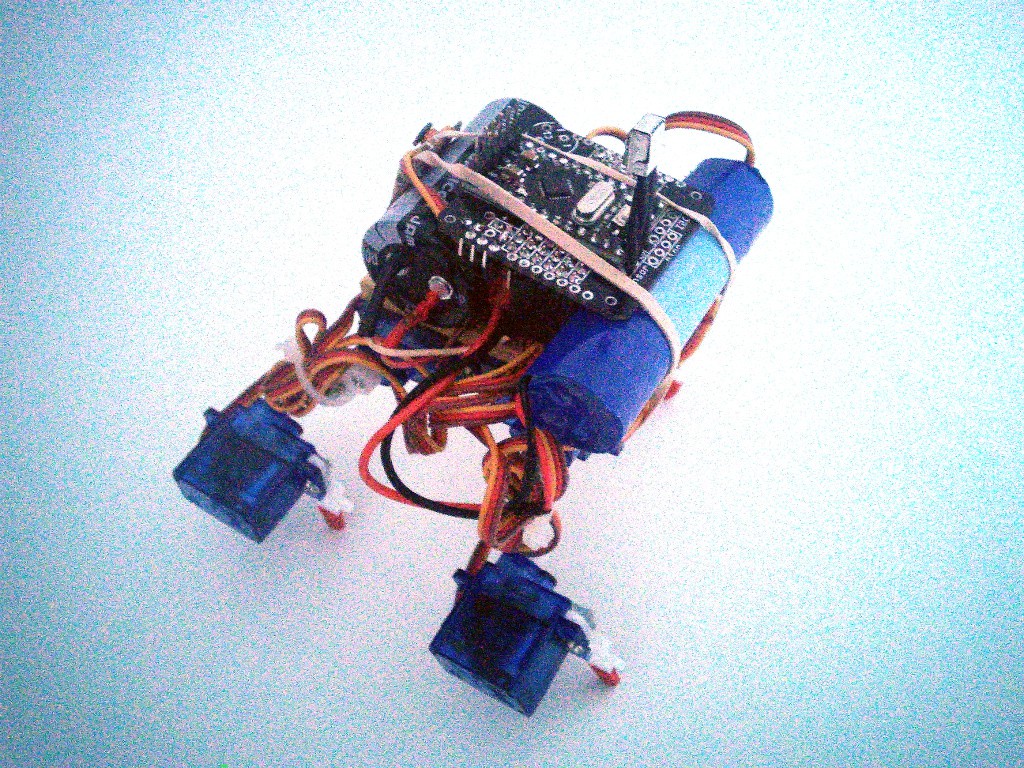
描述:这款机器人仅使用4个线性微伺服,而arduino nano,一个蓝牙收发器两个锂电池,以便它工作。
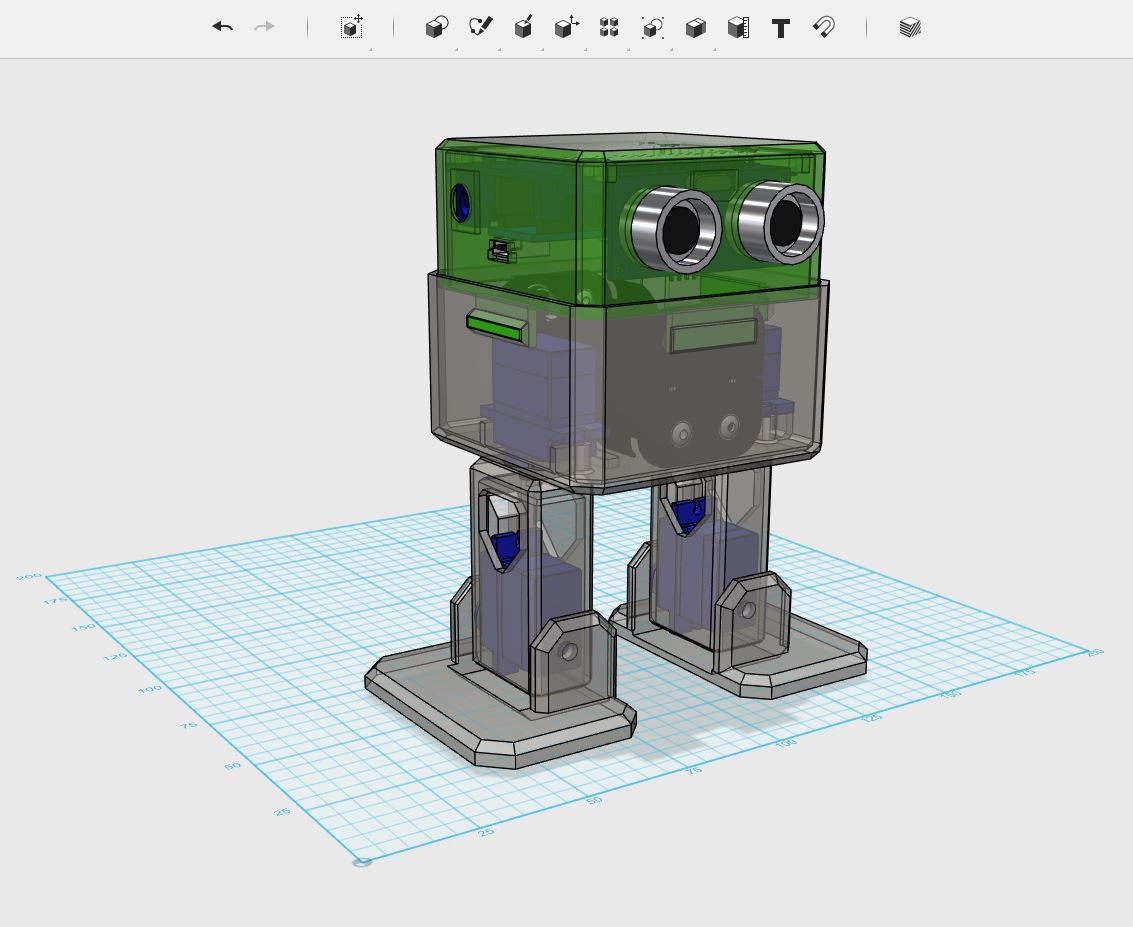
描述;Otto是一个任何人都可以制作的互动机器人。奥托能做什么? 奥托走路,跳舞,发出声音,避开障碍。为什么奥托特别? Otto是完全开源,Arduino兼容,3D打印,并具有社会影响使命,为所有孩子创建一个包容的环境.Otto是使用Autodesk 123D Design(现在的TinkerCAD)免费软件设计,您可以修改它以进行自定义或进一步改进! 如果您认为很难找到零件,您可以在我们的网站上购买完整的套件
描述:一种开源机器人,可帮助制造商构建低成本机器人,而无需从头开始。

描述:我正在设计一个超级便宜的人形机器人平台。 它将与成年人一样大小。
描述:一个开源机器人,可以检查车辆,爬行空间和任何其他需要查看的黑暗空间。

描述:开源和连接通用机器人平台。ROS供电。 传感器:激光雷达,相机,IMU,编码器,距离传感器。 4个直流电机。

描述:ARM Cortex-M4 + ARMv8。 电机接口。 54 I / O,带UART,SPI,I2C,CAN。 C ++ 11 API。 云管理。ROS供电。
描述:Walter是复古风格的6自由度机器人手臂。
描述:最近我加入了Hackaday,当我了解到你可以上传你自己的项目时,我抓住了上传我的六足机器的想法。 它的重量应为3磅左右,配备12个金属齿轮伺服系统。 这个想法是通过红外遥控器控制它,或者通过超声波传感器和叶片开关自动控制它。

描述:模块化,参数化和可扩展的Animatronics cad生成框架。
描述:我有一个老林务员手偶,我想让他搬家。 我是机电一体化和编程的初学者。 所以我希望我的日志对其他初学者有用。
描述:支持蓝牙LE的微型机器人由玩家的手机控制并配备了红外加农炮。 在桌子上的真实世界战略游戏。
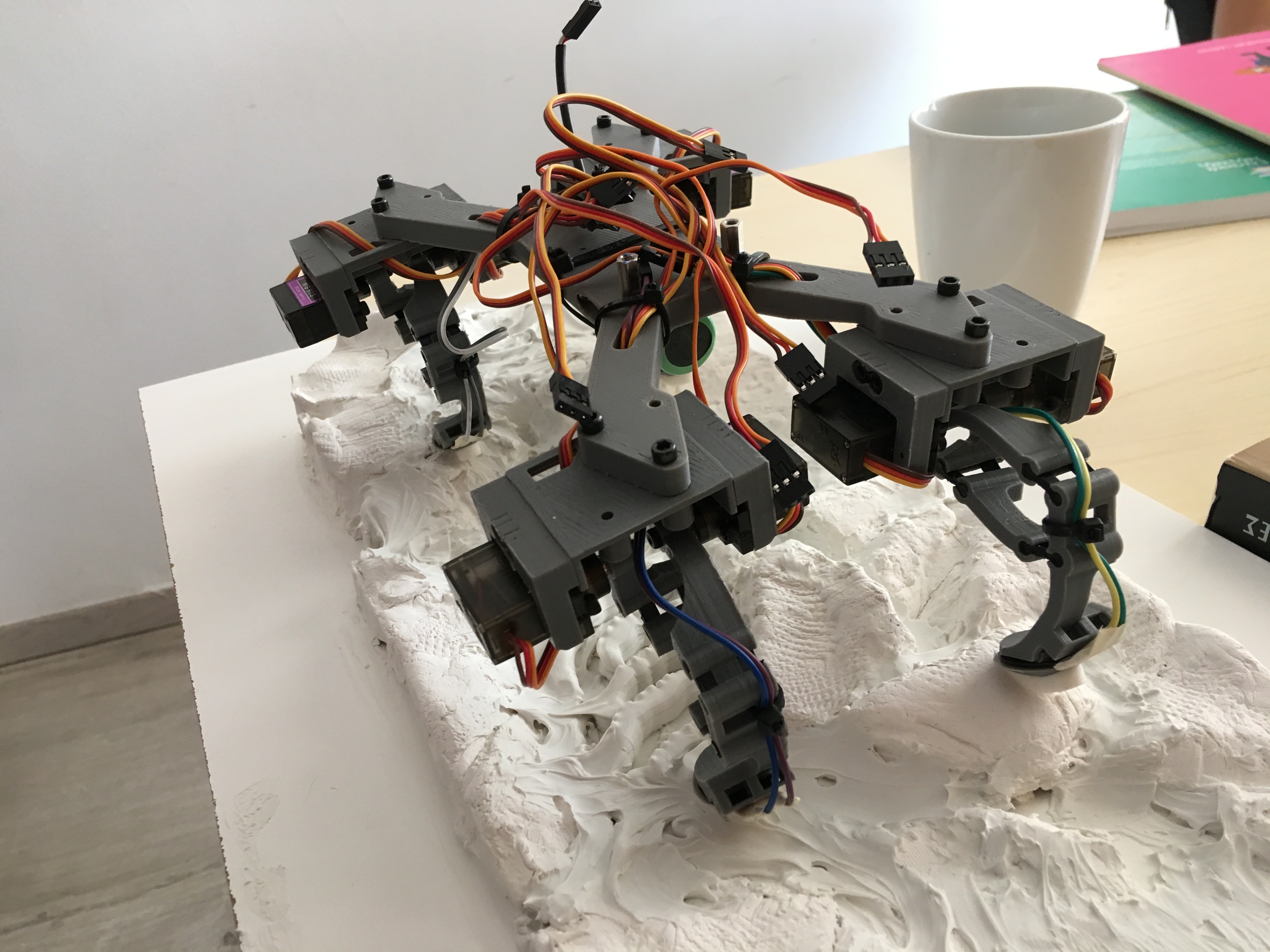
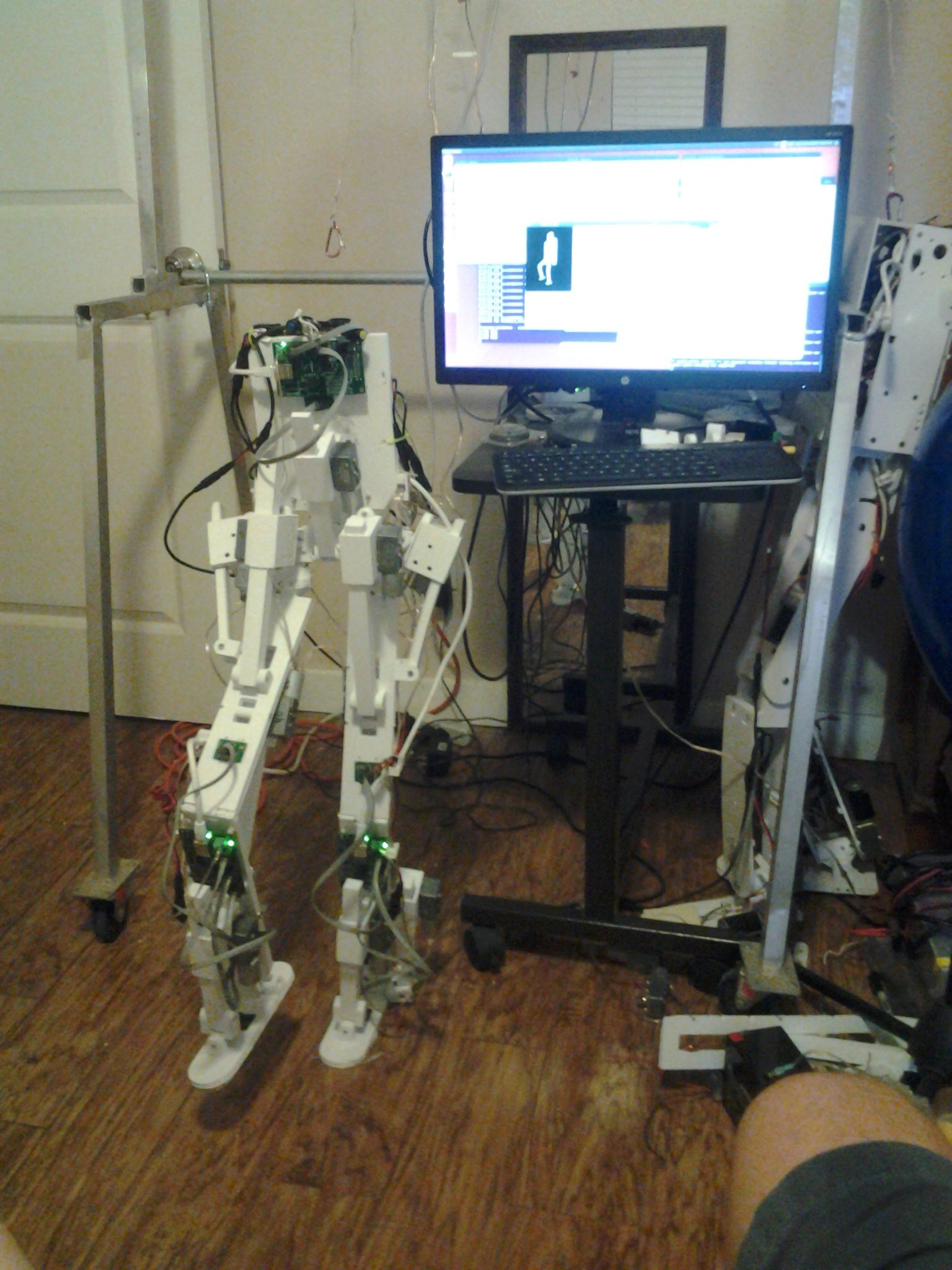
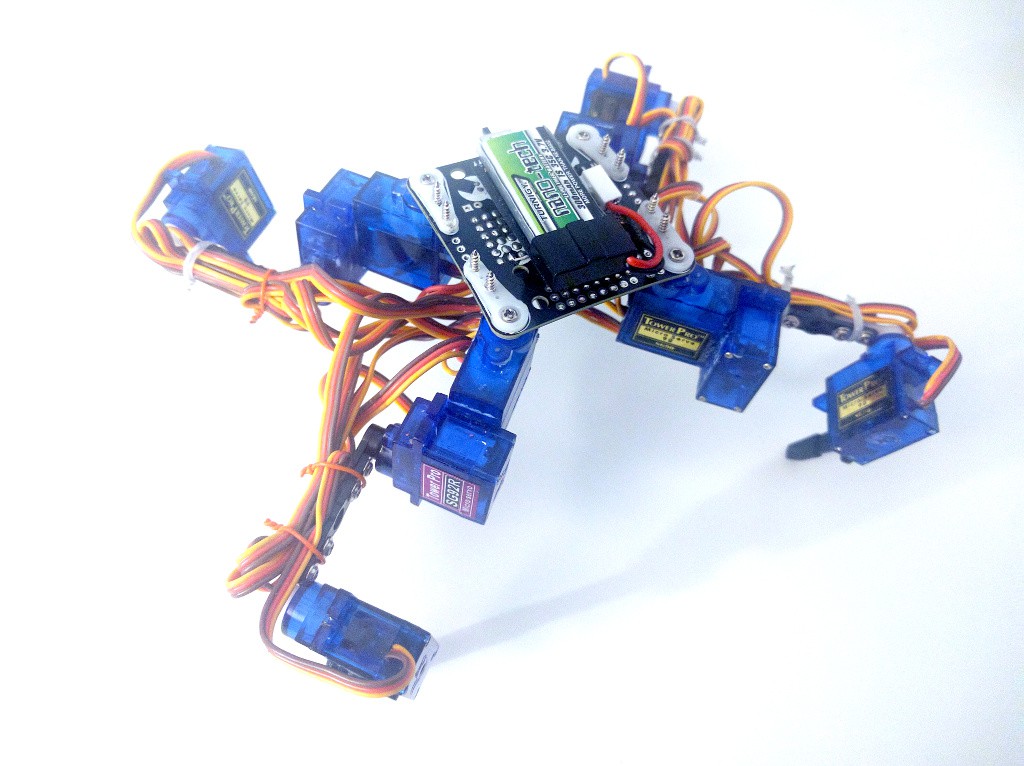
描述:该项目的目的是降低进入动态机器人的障碍。 在看到Boston Dynamic的Wildcat之后,我开始对类似的事情感兴趣,但却对这个最讨人喜欢的场景感到失望。 他们都使用静态运动。 我希望它能活着!我希望如果人们能够看到这种机器人技术可以通过基本的开发技术再现,它会吸引更多的人到有腿的机器人,而不仅仅是那些希望看到模糊的蜘蛛状装置重新实现相同的运动学方程式的人。 再来一次。该方法基于2000年中期苏黎世大学的Fumiya Iida和Rolf Pfiefer的工作。 Pfeifer博士在具体的认知科学领域是众所周知的,这些实验是基于这些原则在四足机器人中产生运动的尝试。

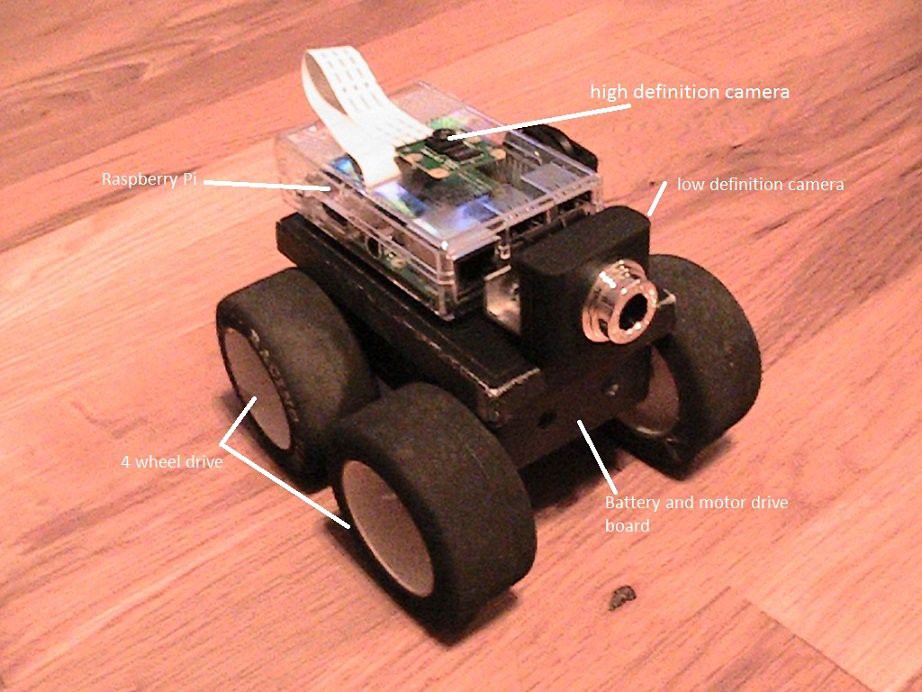
描述:个人机器人一直是个梦想。 凭借现代计算机,机器视觉和WIFI机器人的强大功能,现在是时候开展一个项目,不仅可以执行一项自动化任务,而且可以扩展以执行许多任务。

描述:这个Gopro hack允许使用任何微控制器对机器人应用进行有线控制,而不会中断或损坏按钮。

描述:该项目的主要目标是构建一个能够在崎岖地形中移动和收集数据的移动机器人。 这样的机器人可以用来巡逻你家周围的环境或难以到达和危险的地方。 该项目面向所有希望以合理价格构建可靠移动机器人的黑客和制造商。目前,机器人通过蓝牙从Android应用程序控制。 机器人也可以通过语音命令控制。 在我的计划中,这个机器人应该能够以自主模式移动。

描述:提出了廉价机器人平台的开发。 我们的目标是提供一个完整的硬件工具作为低成本实验室,以说明控制系统。 该平台的功能允许研究人员和学生从基础技术到复杂技术(例如从PID到多代理系统)实现。 设计和开发的硬件使用以下功能执行单个或多个机器人控制的实验:运动,通信,感知和自主决策。 我们用这个平台说明了三种不同的控制技术。
描述:我们的目标是使多机器人系统成为向学生介绍机器人技术的可行方式。
描述:业余爱好无刷电机非常便宜且功能强大。 但是,我们需要一种方法来制造机器人。 ODrive就是这样。
描述:模块化自重构机器人,专注于使用生物启发运动机制的全地形搜索和救援行动。
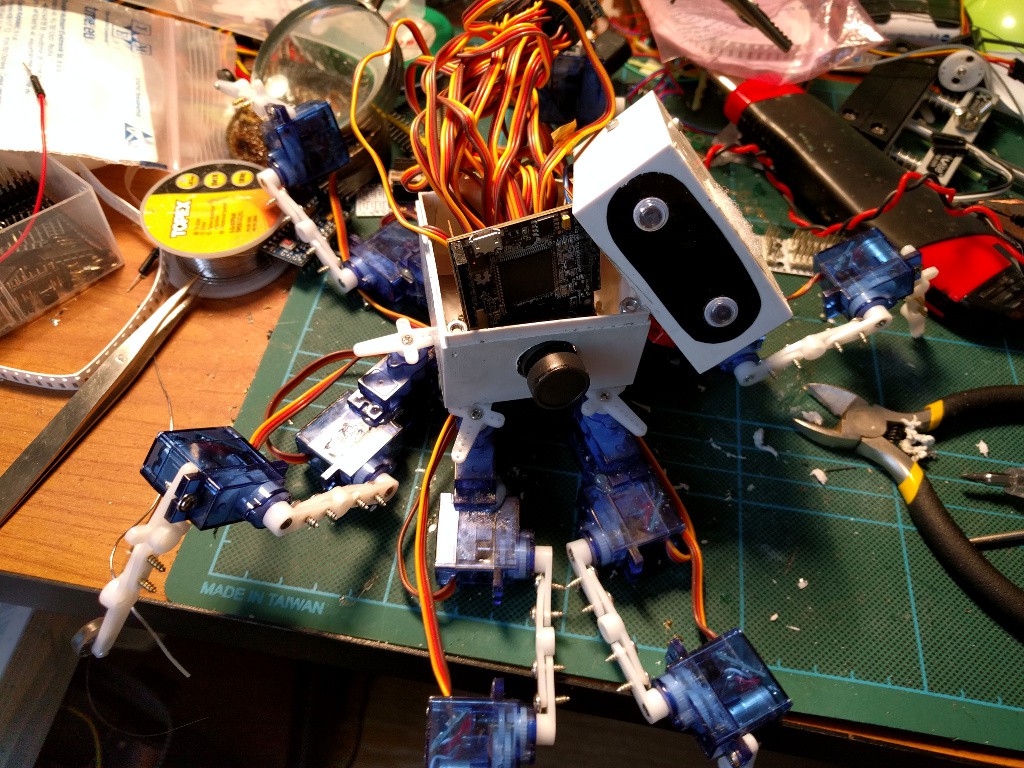
描述:亨克从未完成。 不知怎的,我只是没有时间和动力。 最后我决定废弃其中的大部分内容,重新开始,重新使用机械部件,但完全更换内部部件。 这次我正在使用带摄像头的OpenMV和我自己的伺服控制器。 还有一些定制传感器。目标是制造一个实际上做有趣事情的机器人,而不仅仅是前进。 有六条腿,它可以使用两条前腿进行操作,而使用相机,它实际上可以看到它正在做什么。 它不会是一个遥控玩具,它将成为一个合适的机器人。 这是改善和扩展业余爱好机器人世界的努力的延续。 本系列之前的项目Tote是一个很好的起点平台。 这是更先进的。
描述:我们将在Hackaday Belgrade研讨会上建造这些产品。 该设计与普通手提包非常相似,但有一些改进和惊喜。 PCB上还有一个大型的Jolly Wrencher徽标。

描述:Mirobot是一款基于Arduino的WiFi机器人套件,旨在帮助孩子们了解技术。

描述:请求加入此项目,然后打开左侧的“团队消息”,点击建立机器人。
描述:我决定在我的行走机器人系列中真的需要一个六足机器人。 我有一堆舵机,伺服控制器和PyBoard,所以为什么不呢? 唉,我从来没有完成它的编程,它花了一些时间在架子上。 然后我拿到了我的OpenMV板,并决定将它放在机器人上。 亨克自告奋勇。
描述:一种小型步行机器人,具有类似哺乳动物的腿部结构。
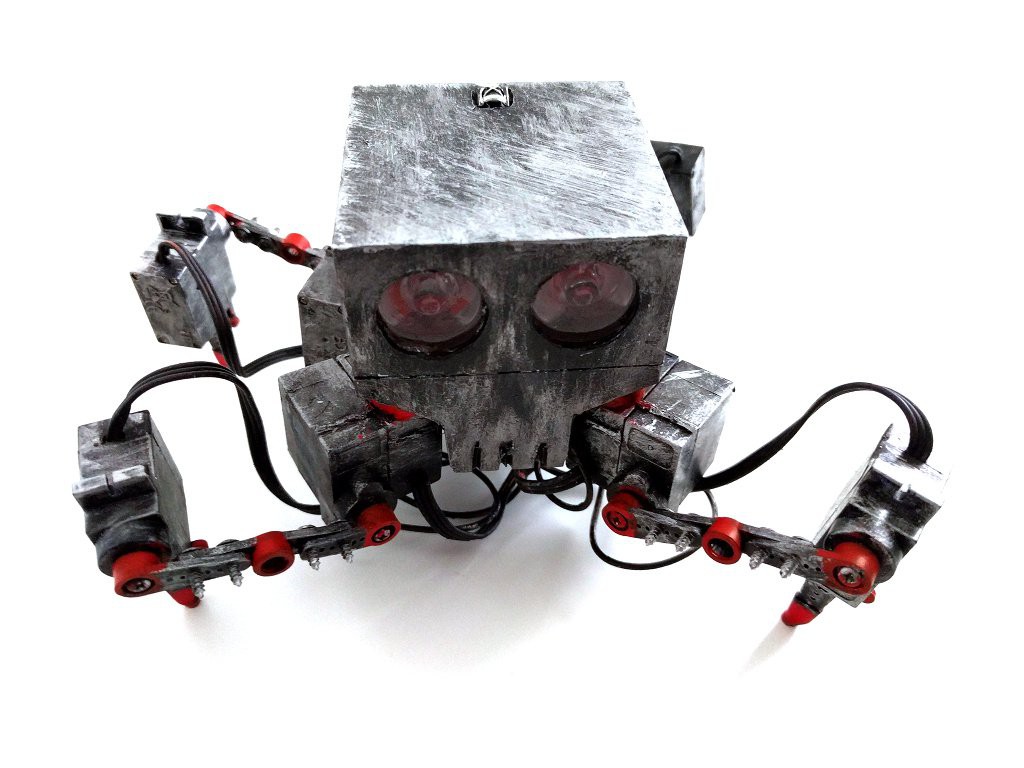
描述:Logikoma是壳牌幽灵世界中“智囊团”的成员之一。 它似乎是迄今为止最古老的设计,对我来说,机械上最有意义。 这是尝试建立其中一个的工作模型。 这并不准确,因为我简化了很多事情 - 我宁愿追求实用性。
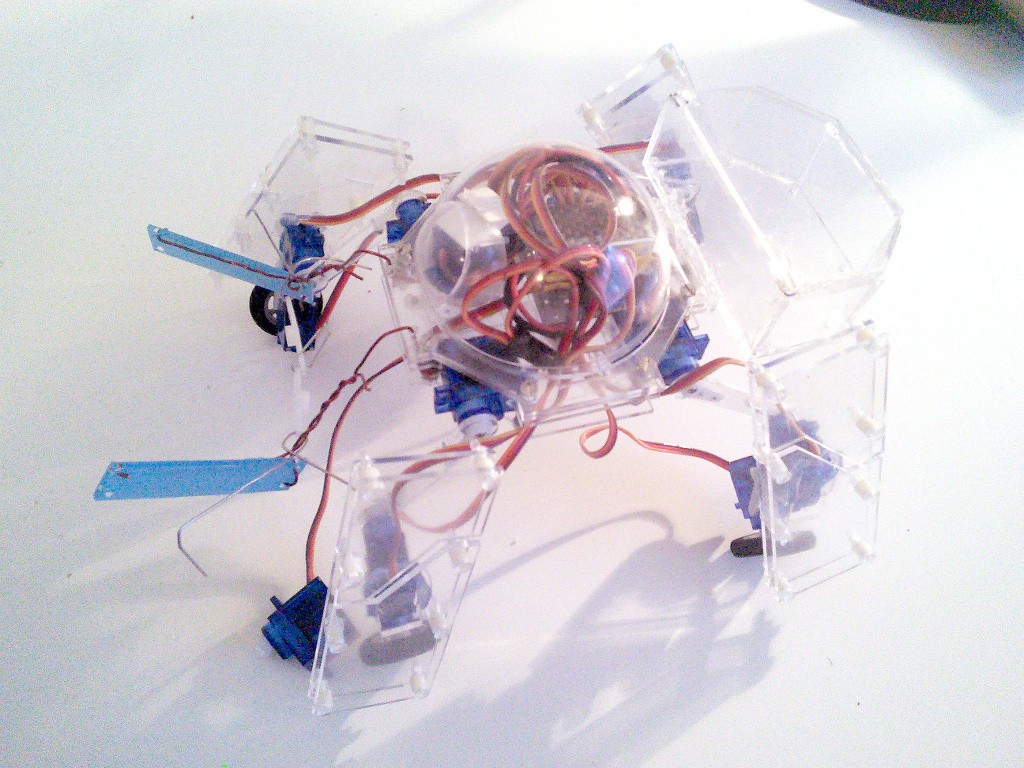
描述:手提包是一种四足的蜘蛛状机器人,设计为便携式步行机器人实验的简单基础。 它很容易制作,但很容易修改和扩展。
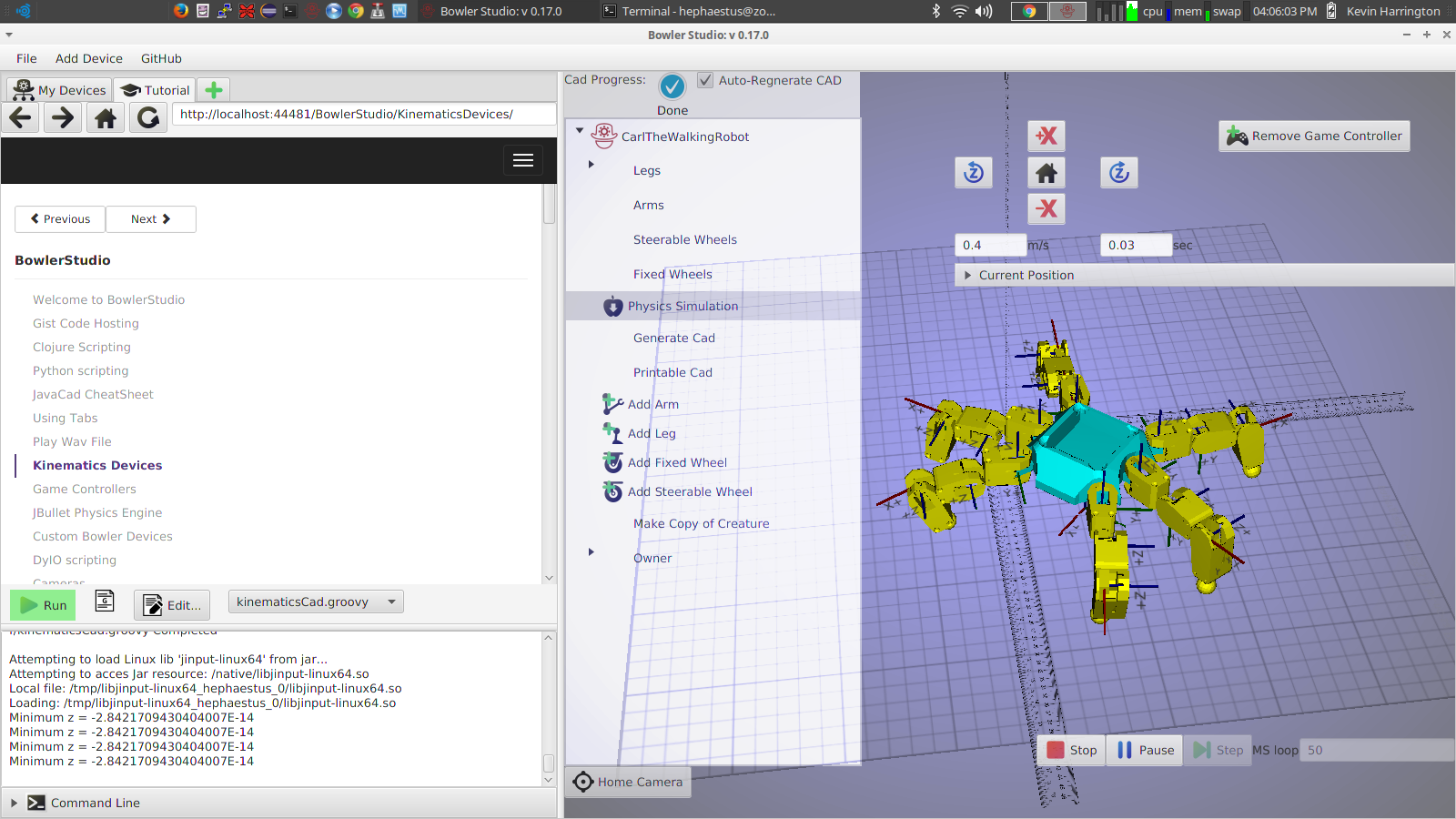
描述:BowlerStudio是一款机器人开发应用程序,它将脚本和设备管理与强大的控制和处理功能相结合。目标是创建一个全栈机器人开发环境。 我希望将运动学,CAD,控制律,固件,CAM和模拟的设计过程统一到跨学科应用的单一技能组合中。 这一单一技能就是编程。 通过编程构成机器人工程的相互关联学科的所有任务和关系的角度来看。 您可以将关系和交互表达为函数和库。 重新定义开发过程的目的是加速机器人开发,降低新开发人员的技能障碍,并提高机器人工程技术水平。
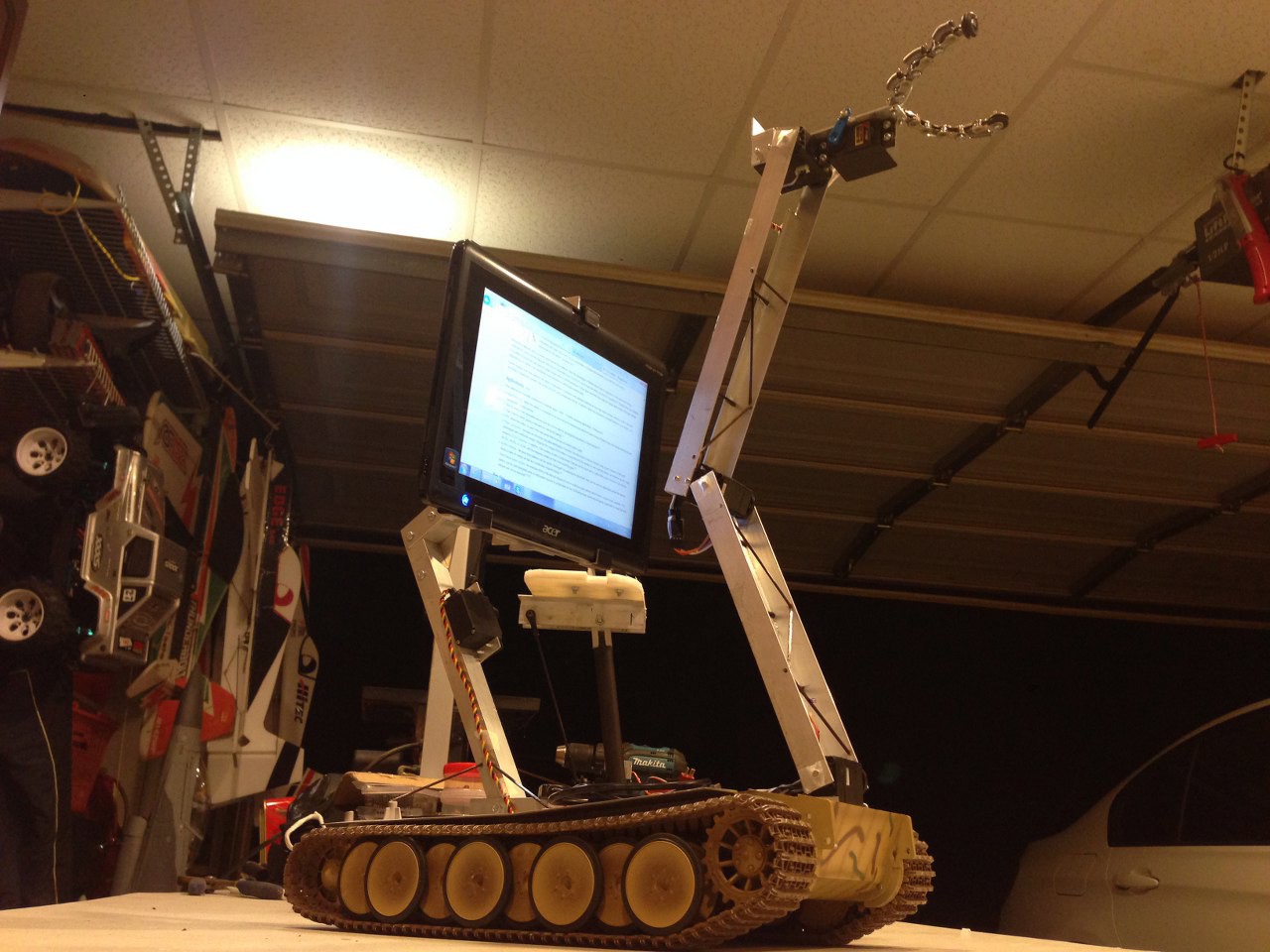
描述:这款远程呈现机器人可以代表您在任何距离上进行网络覆盖(Wifi,3G或LTE等)。最好的部分是...... Mark I的成本约为200美元,Mark II的成本为300美元。
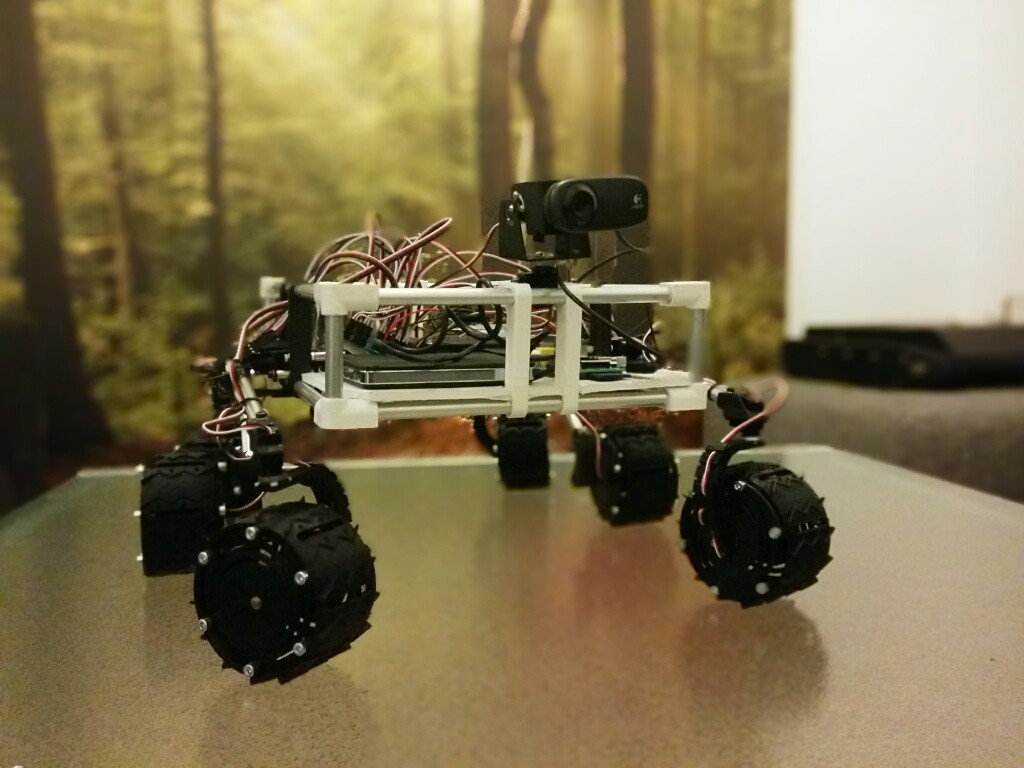
描述:火星。 正在由埃因霍温黑客/创客空间MADspace开发。 在最近获得3D打印机之后,我们开始主要使用3D打印部件进行制造。

描述:创建一个受TitanFall titan启发的机械化机器人,但使用气动执行器并以合理的预算建造它。基本构建将导致成人大小的步行机器人。 如果初始构建开始(字面和比喻),将添加更高级的功能,如跑步,跳跃,蹲伏。
评论
0 / 100
查看更多
 Lucia li
Lucia li2019-08-11
1880

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号