hackster.io资源汇总: 树莓派3B中类别为 机器人 的相关项目
收藏
分享
脑图
图片
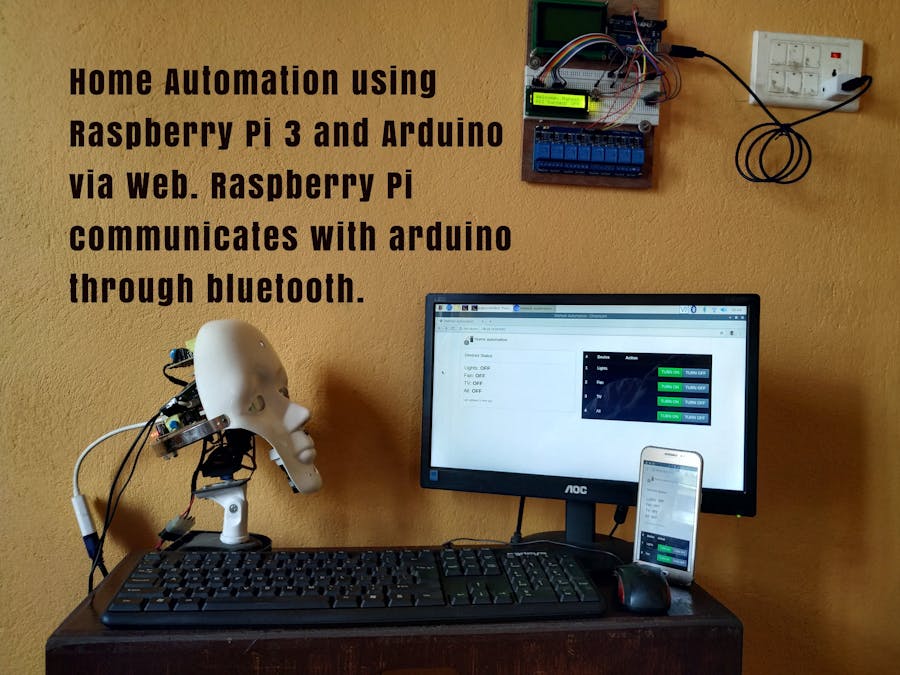
概述:用户通过网络或移动应用程序请求树莓派。覆盆子pi然后通过蓝牙与arduino通信以控制设备。
图片

概述:建立了一个聪明的树莓派调酒师,可以同时混合多达6种成分来制作饮料,所以你可以喝任何东西,从朗姆酒和可乐到长岛冰茶。
图片

概述:终极商务配件,满足您所有企业需求的机器人伴侣。包括励志名言和流行语!
图片
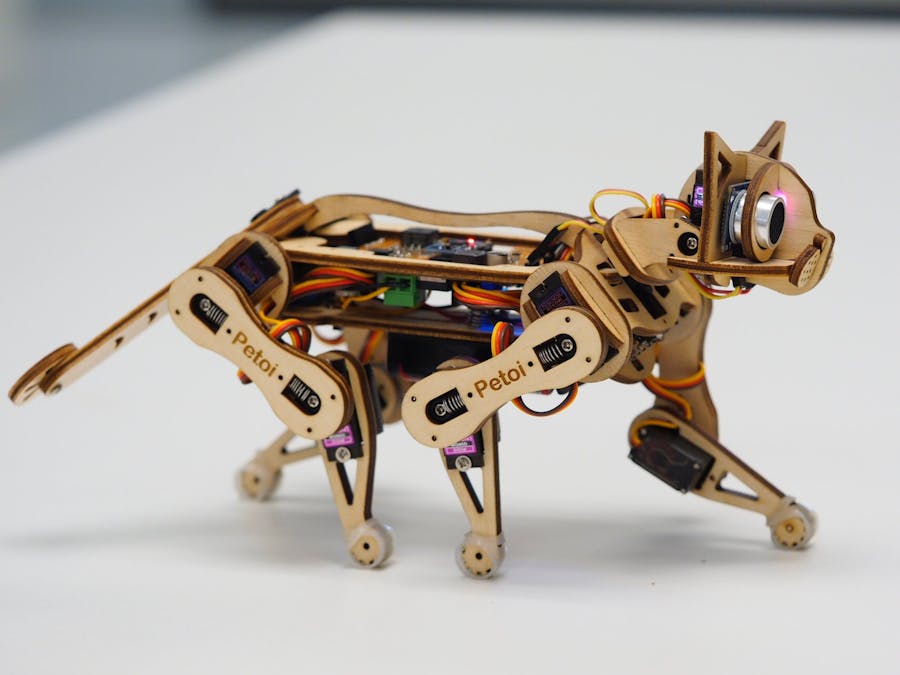
概述:一只作为杂技演员激光切割的机器人小猫,它的运动由arduino兼容微控制器驱动。它储存本能的“肌肉记忆”,以便四处活动。
图片

概述:jqr四足机器人是一个diy项目,主要目标是建造一个自主的、有腿的机器人,帮助人们进行许多活动。
图片
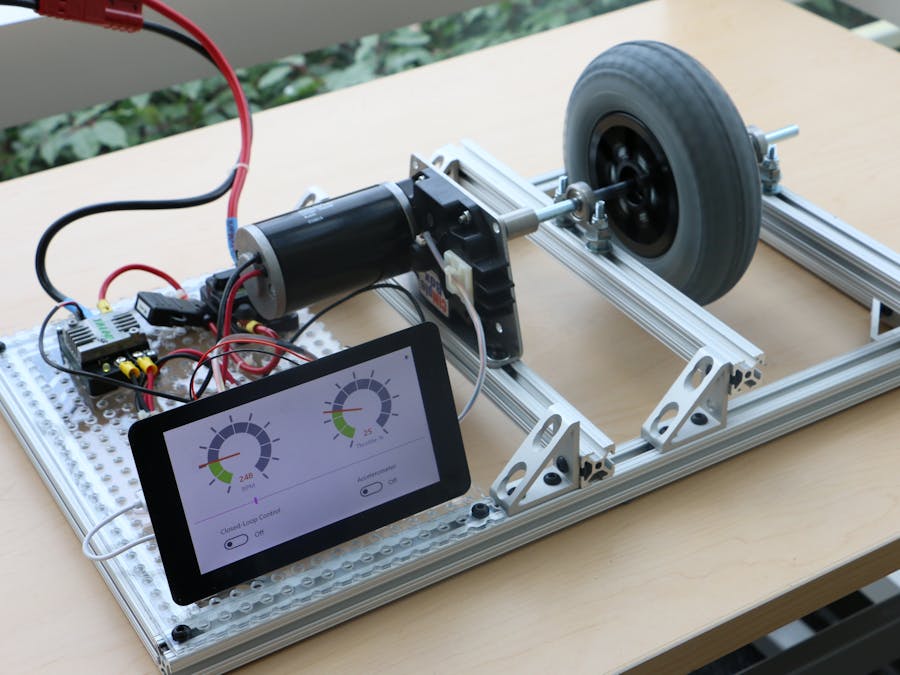
概述:使用pid控制器监控车轮速度,并持续达到所需转速。该项目展示了如何使用树莓派 3上的windows 10 iot内核,通过向电机控制器提供输入,然后使用数字编码器测量旋转电机的速度来旋转电机。我们在pid回路中使用数字编码器反馈来控制电机的速度,通过这样做,我们创建了一个闭环控制系统!
图片

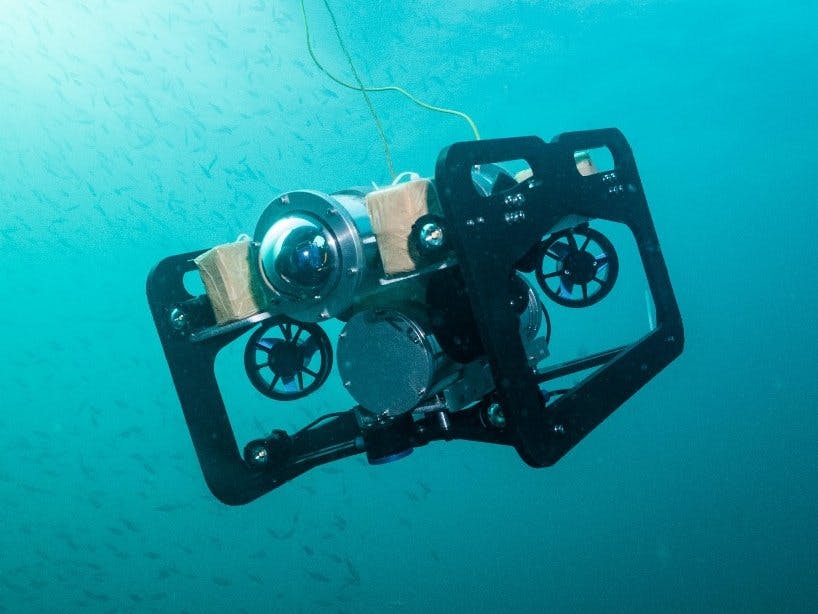
概述:本文介绍了树莓派水下无人驾驶飞机样机的设计过程、开发和装配操作。
图片
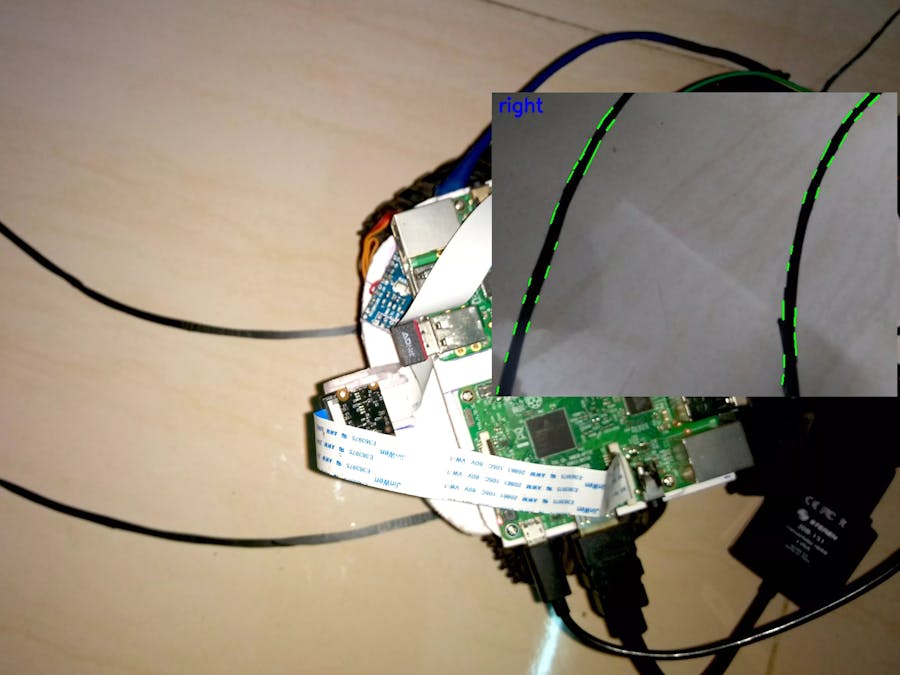
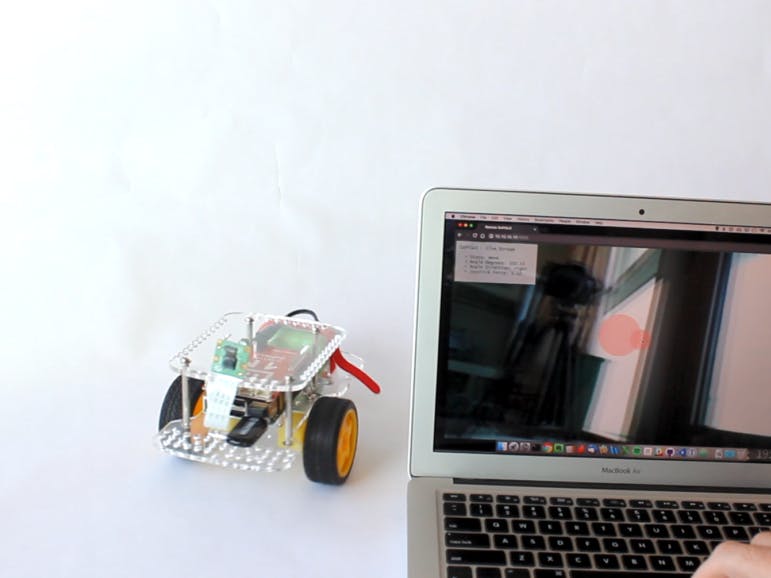
概述:利用opencv和python对树莓派3进行简单的车道检测。帧速率最高可达17 fps。
图片

概述:在温室环境中自主驾驶并识别疾病的机器人。
图片
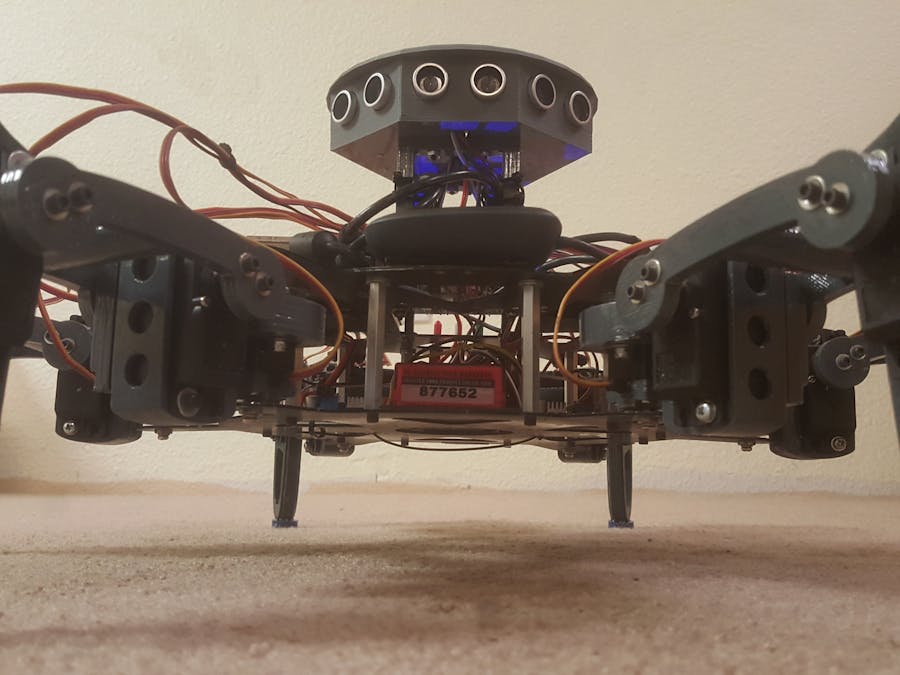
概述:使用反向运动学的六足机器人,具有udoo x86大脑、通过xbox控制器的mqtt遥控器和视频流(3d打印腿)。
图片

概述:nox是一个不错的(耗时的)机器人,它使用带有kinect的slam (ros)在环境中导航。
图片
概述:无人机用于持续监控水产养殖行为,如水质、温度、压力、ph值等。
图片
概述:树莓派驱动的面部识别会说话的机器人头部。
图片

概述:使用alexa控制树莓派动力猫喂食器。猫喂食器也可以使用亚马逊drs重新订购猫食。
图片
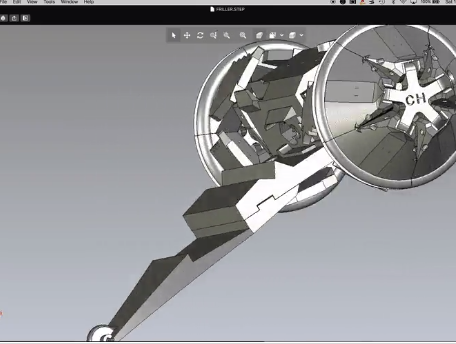
概述:皱褶机器人(皱褶探索者机器人)是一种3d打印的小型机器人,它改变轮子的半径以克服障碍。它可以用来探索极端地形并到达感兴趣的目标。
图片
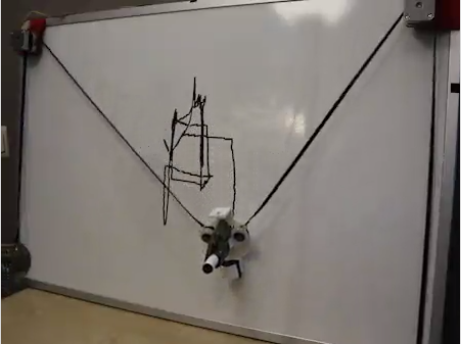
概述:plotti botti是一个附着在白板上的xy绘图仪,任何人都可以通过letsrobot.tv进行控制。
图片

概述:我们可以利用kinect库,而不是使用单个摄像机和复杂的图像识别算法。
图片

概述:gps引导的自治系统,用于绘制特定区域的水和空气质量图,实时传输数据。
图片

概述:允许将任何基于linux的设备变成amazon echo的解决方案。这个项目旨在提供将alexa带到任何linux设备的能力,包括像树莓派板这样的嵌入式系统。
图片
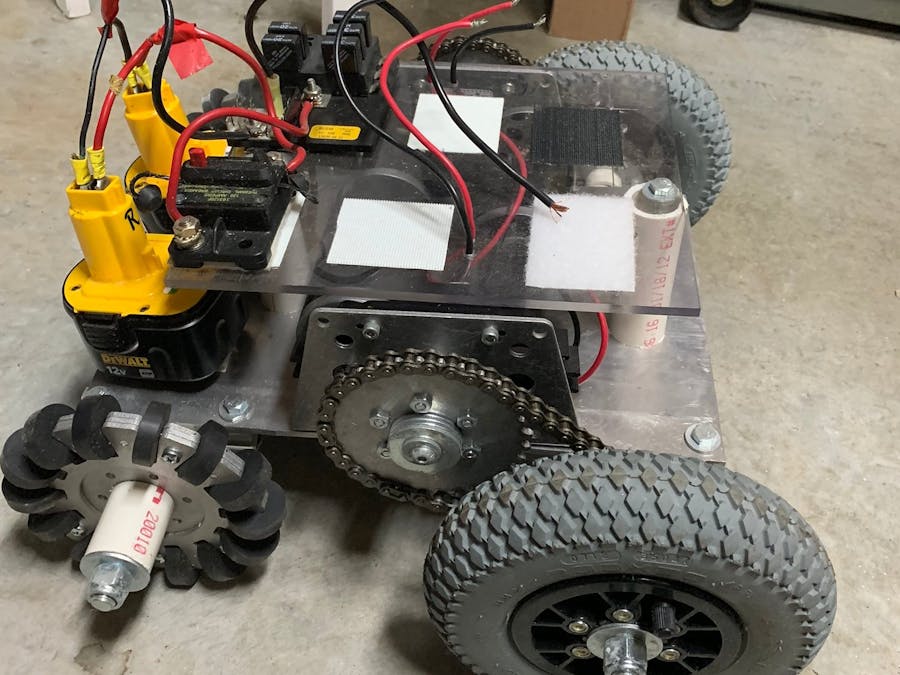
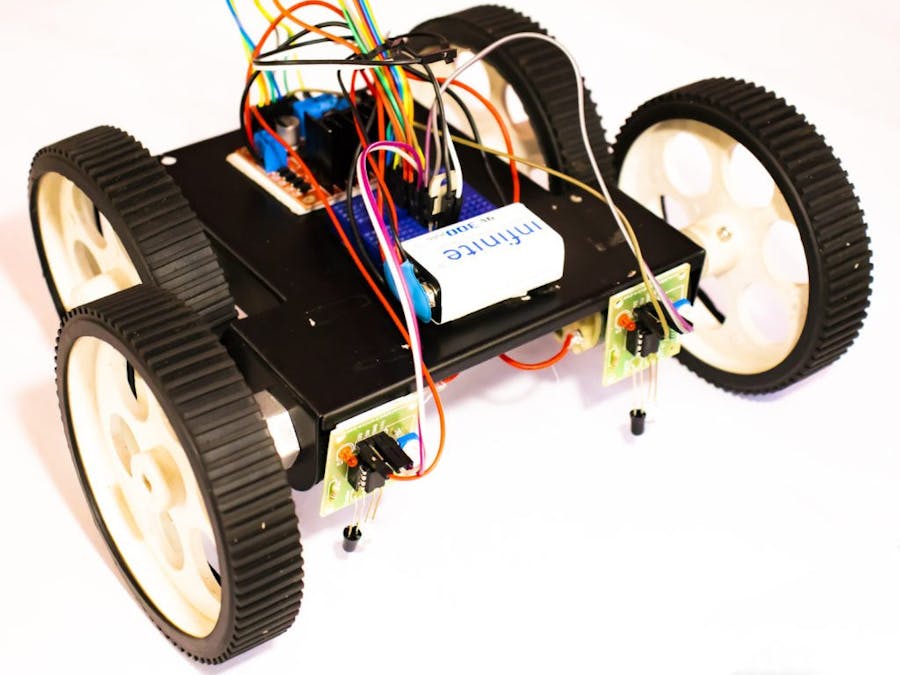
概述:重型机器人汽车基地运行在12v直流电。使用速度控制器和树莓派来处理通信和控制。
图片

概述:与walabot pro一起制造用于商业检查工作的高性能无人驾驶飞机,可以进行墙后检查和安全雷达检查。
图片
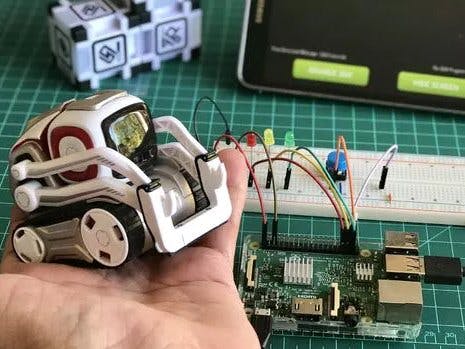
概述:使用cozmo的sdk与树莓派的集成,cozmo是一个很棒的小机器人,可以用python完全编程。
图片
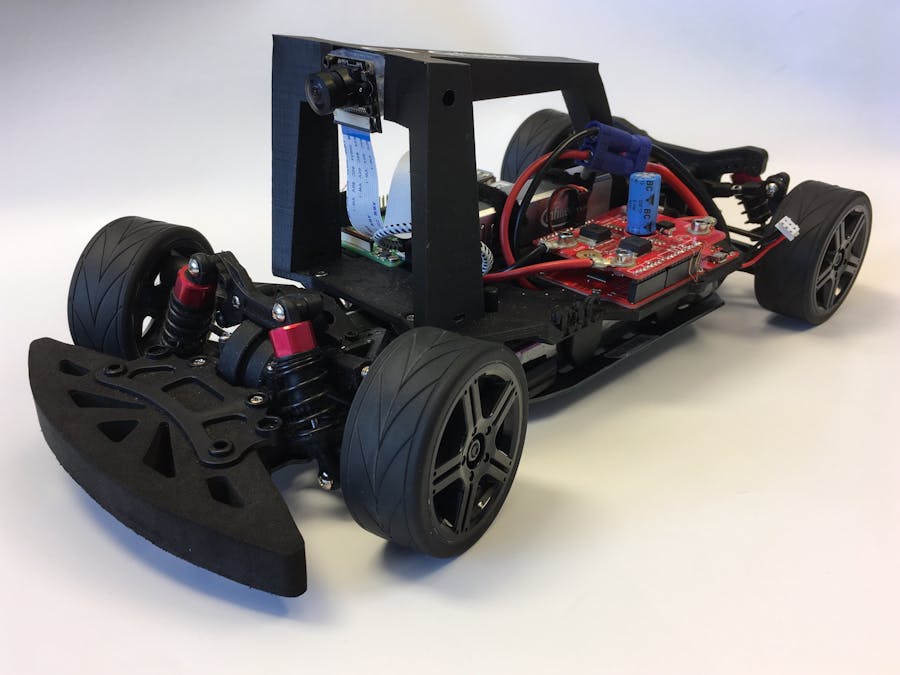
概述:这辆rc汽车配有摄像头、覆盆子pi、xmc1100启动套件和带btn8982ta的直流电机控制护罩。基于驴车项目,树莓派能够保护图像、油门和转向数据,这些数据将被处理以训练神经元网络。训练有素的网络将被放置在树莓上自动驾驶汽车。
图片
概述:brickuber是一个开源的魔方求解机器人,你可以自己构建。
图片
概述:使用android东西创建机器人,树莓派3和arduino writte在kotlin完美结合。
图片
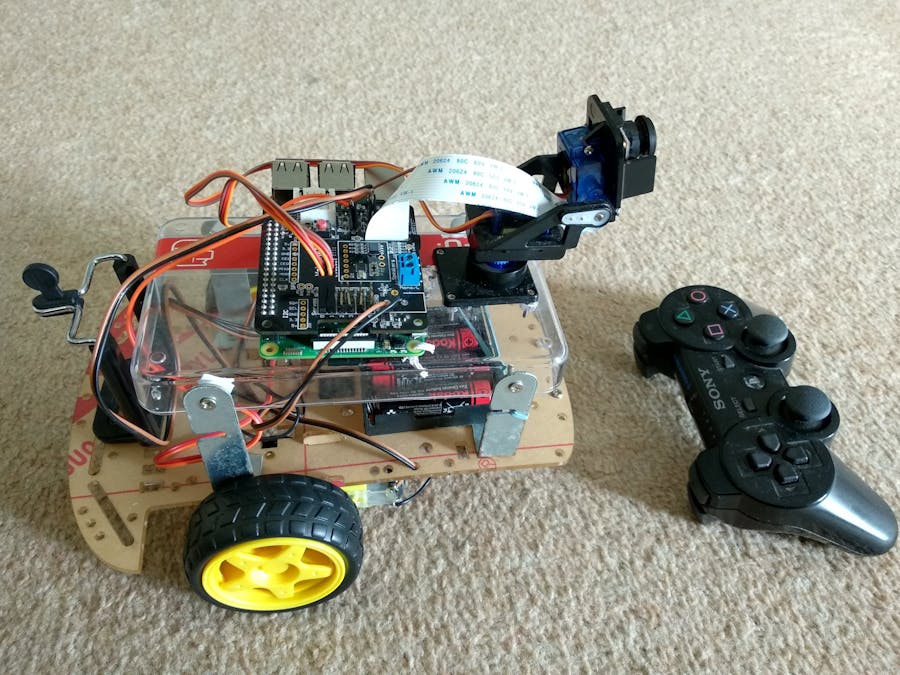
概述:使用ps3控制器控制树莓派动力机器人,并使用海龟和python代码绘制绘图。
图片
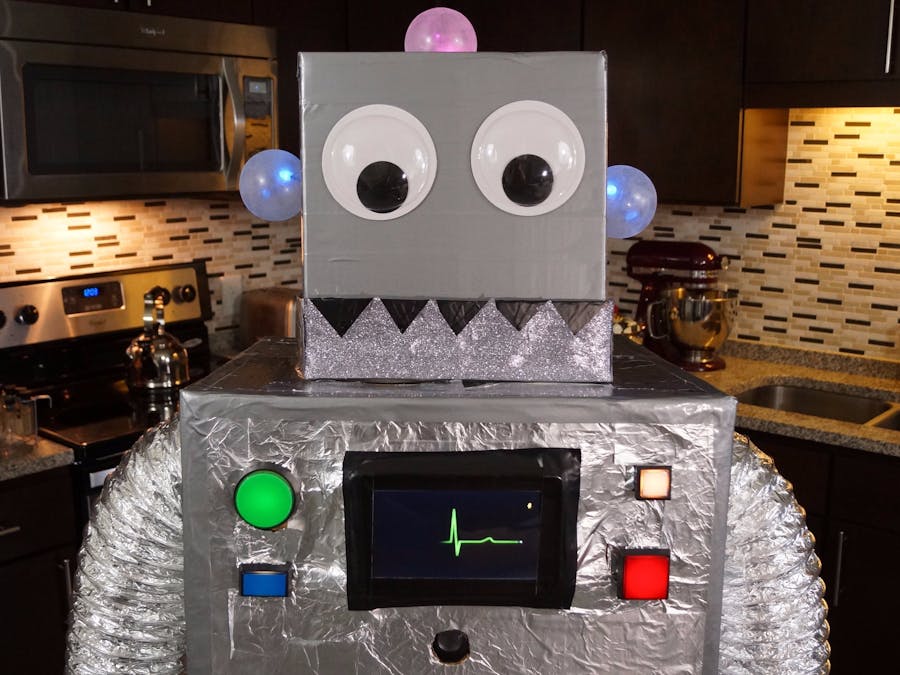
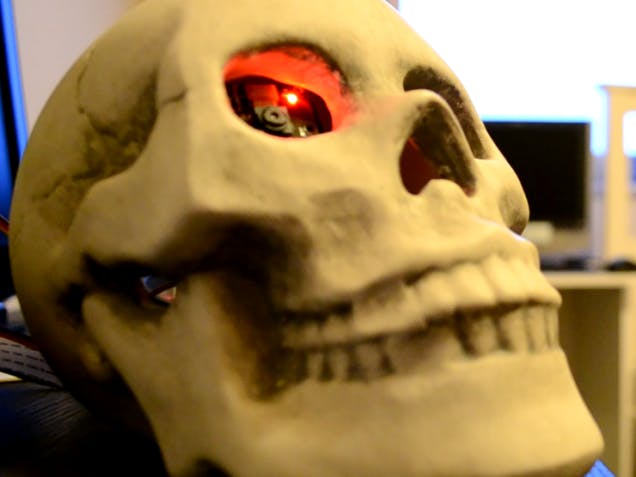
概述:万圣节的机器人,写了一个运行在树莓派上的python脚本来检查我的instagram上的喜好。每当有人喜欢我instagram上的图片时,脚本就会在树莓pi显示屏上播放心电图心跳视频。
图片

概述:呼吸和连接助手允许用户通过互联网控制具有视觉和听觉反馈的机器人,同时从walabot向护理人员的电话提供呼吸信息,并在家中充当同伴。使用walabot,用户还可以检查某人是否呼吸良好,或者根本没有呼吸。这种设计也具有适应性,允许用户修改机器人底盘和软件以满足他们的需求。
图片
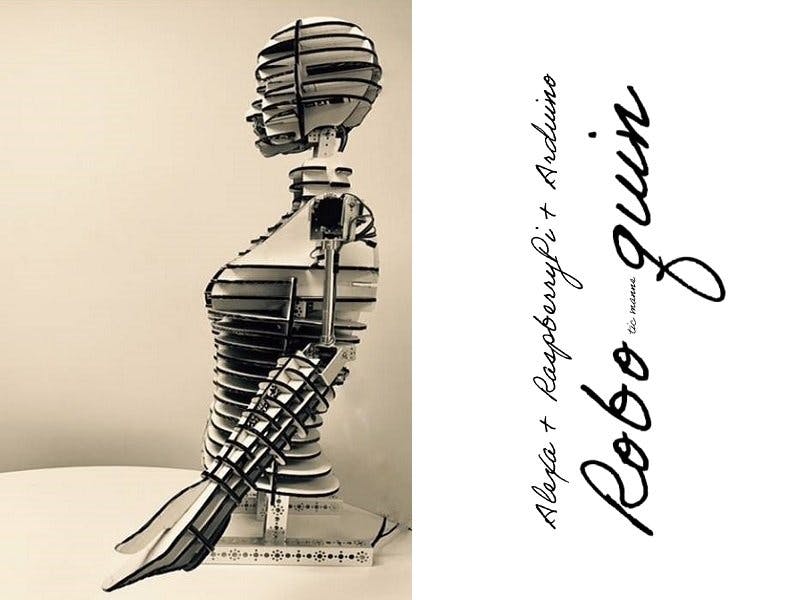
概述:roboquin的语音合成和语音命令识别使用亚马逊alexa。arduino用来控制头部和手臂的运动。
图片
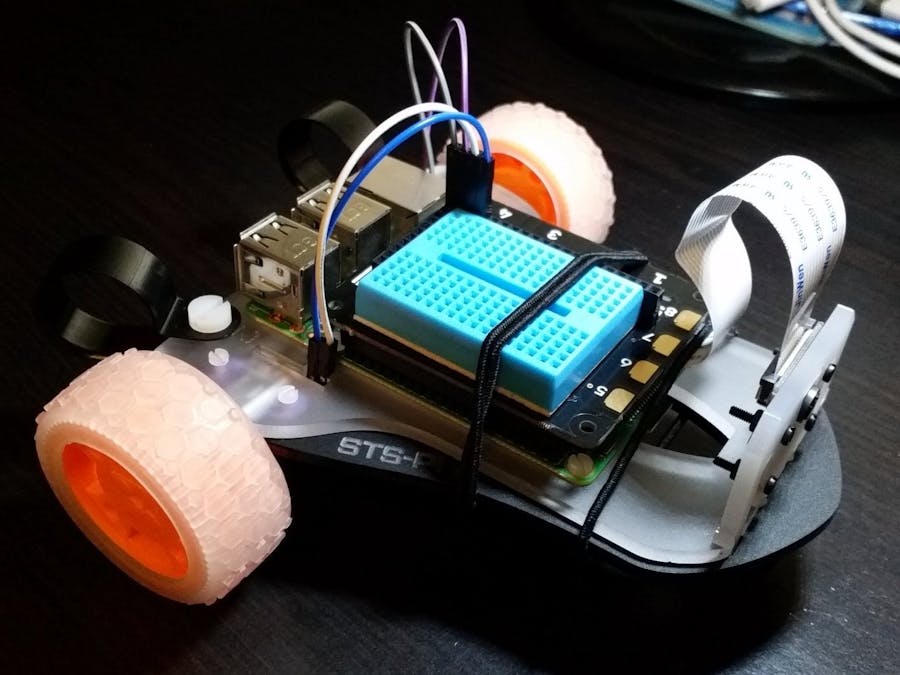
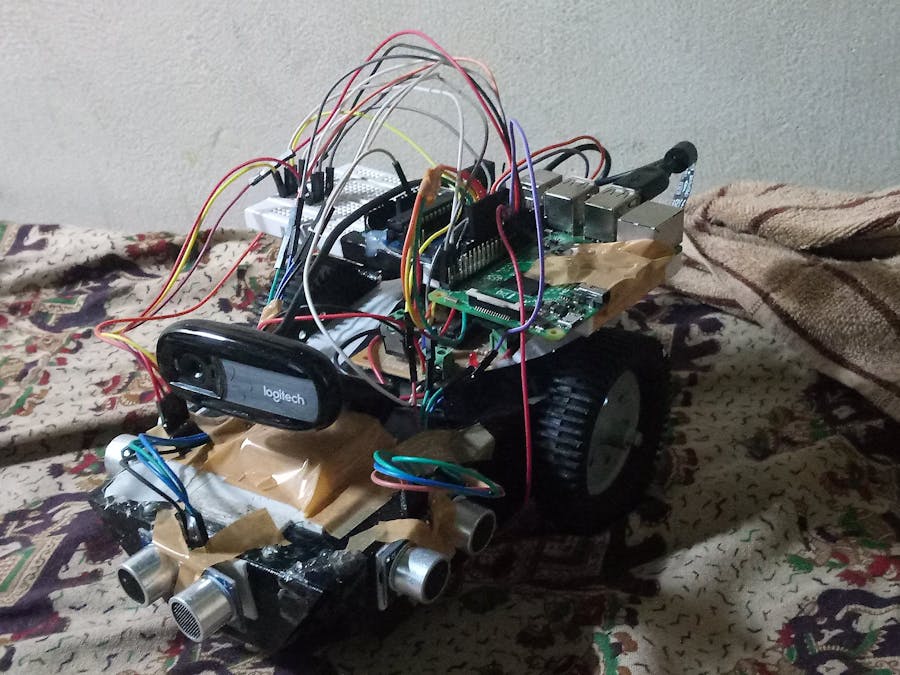
概述:不需要焊接就能制造出一个令人敬畏的相机驱动的巡回机器人!在本教程中,我将向您展示一个简单的逐步指南,帮助您构建第一个漫游机器人!
图片
概述:在gopigo3的这个高级项目中,我们构建了一个浏览器视频流机器人,它可以将实时视频流传输到浏览器,并且可以从浏览器进行控制。
图片
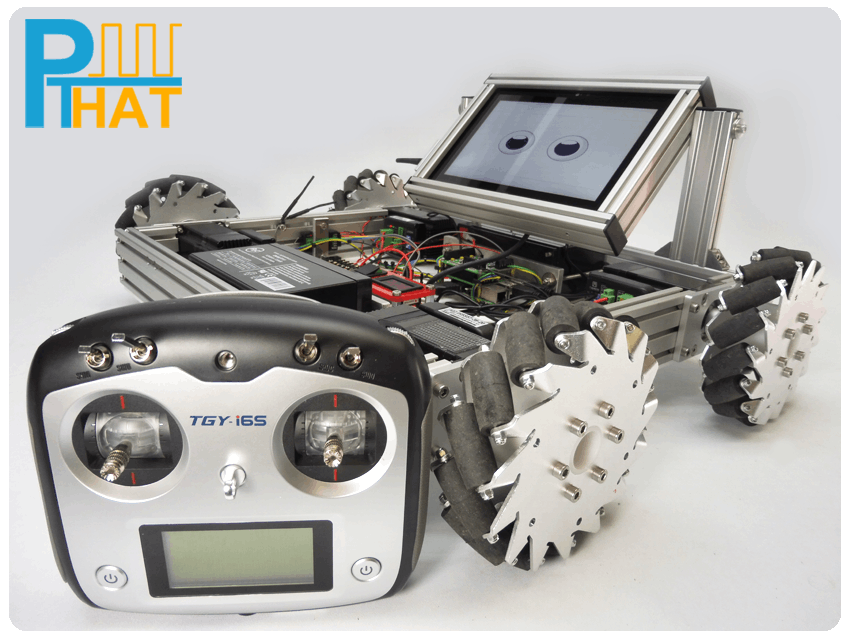
概述:在之前展示的mecanum机器人由无线xbox控制器控制上增加了rc发射器/接收器。
图片
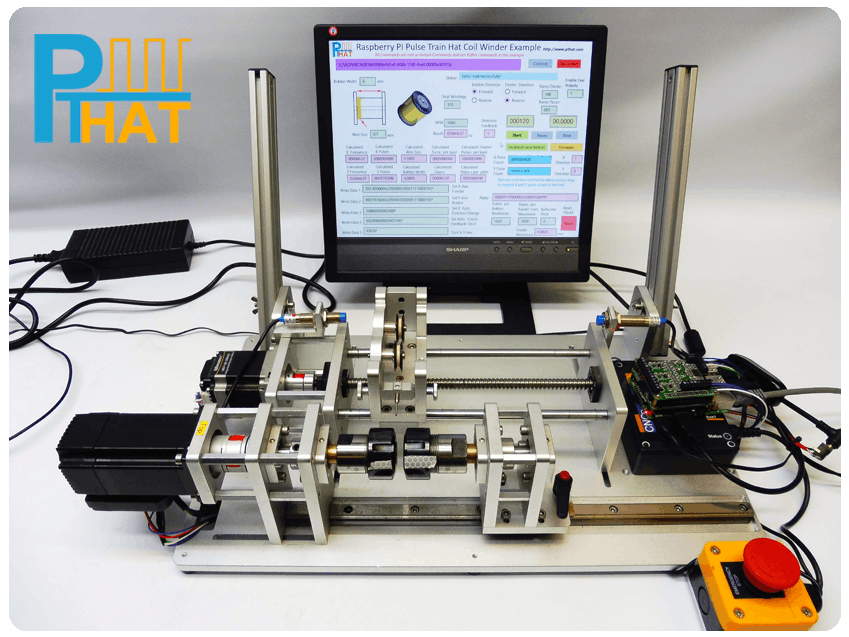
概述:通过这个例子,我们展示了如何使用pthat控制线圈绕线机。
图片

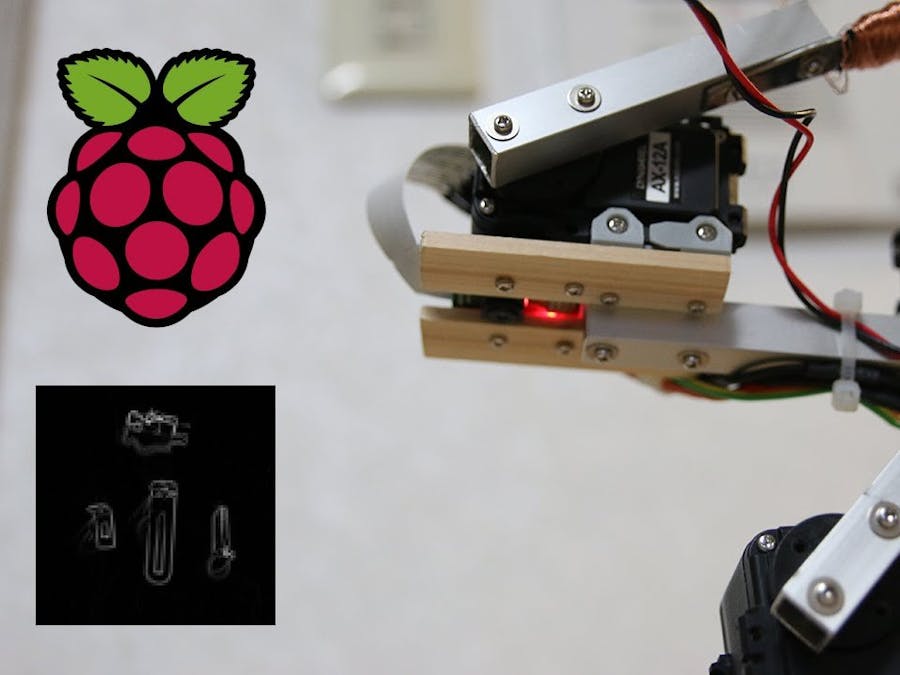
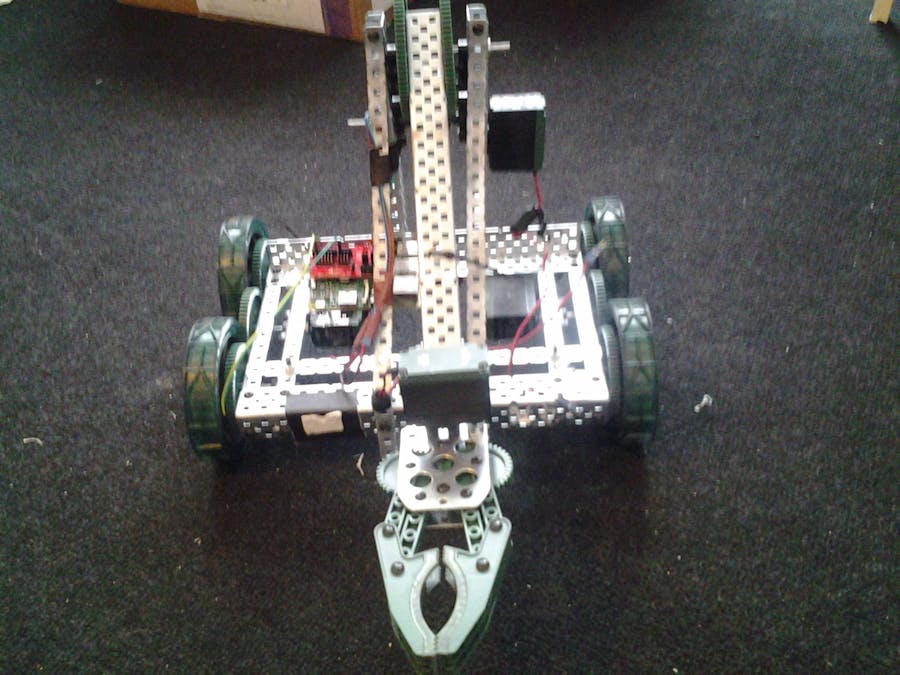
概述:使用树莓派、python和xbox 360控制器控制连接到arduino机器人手臂套件的伺服系统/电机。
图片
概述:这是一个python程序的例子。
图片
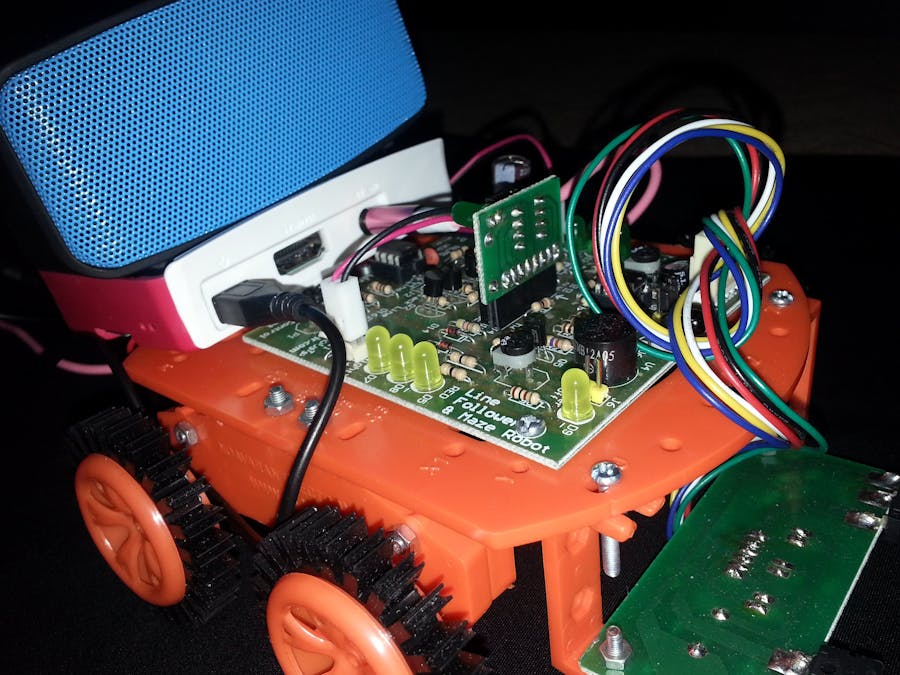
概述:这个机器人是一个线路跟随者,一个向导来给我们介绍历史事物。所以它走在黑线上,将来会被树莓派控制。
图片
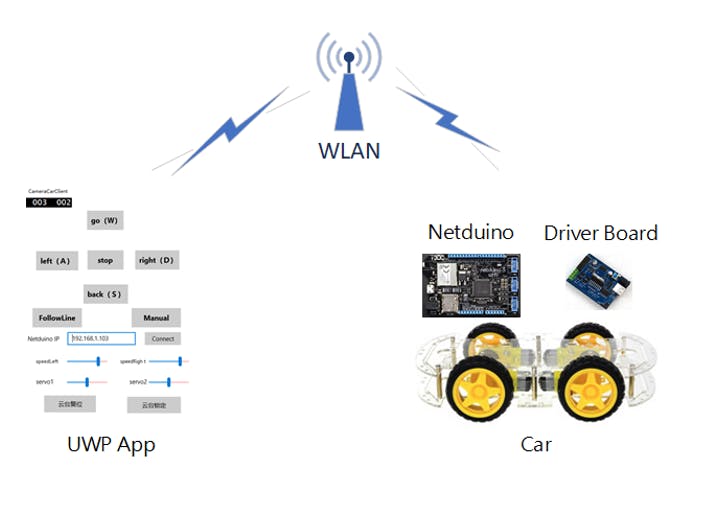
概述:本项目基于netduino 3 wifi设计了一款uwp控制的无线netduino汽车。
图片
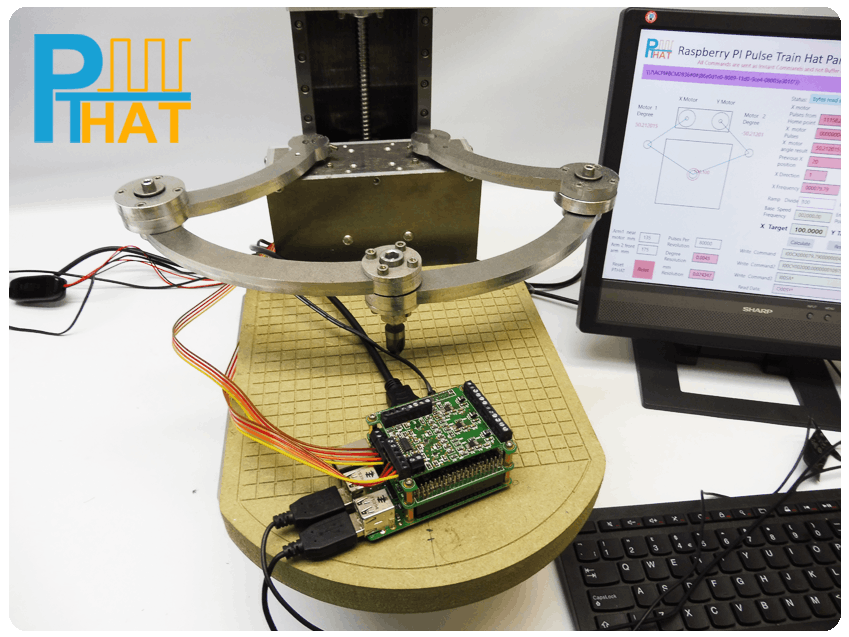
概述:通过这个例子,我们展示了如何使用pthat和覆盆子pi树莓派
图片

概述:从嵌入式linux c/c++背景中学习ada,我需要一个好的项目,所以我选择使用覆盆子pi和它可以控制的机器人。
图片

概述:aya是一个交互式机器人,它存储你的照片以识别你并与之互动。2017年黑客入侵北方的赢家& AWS的最佳使用。
图片

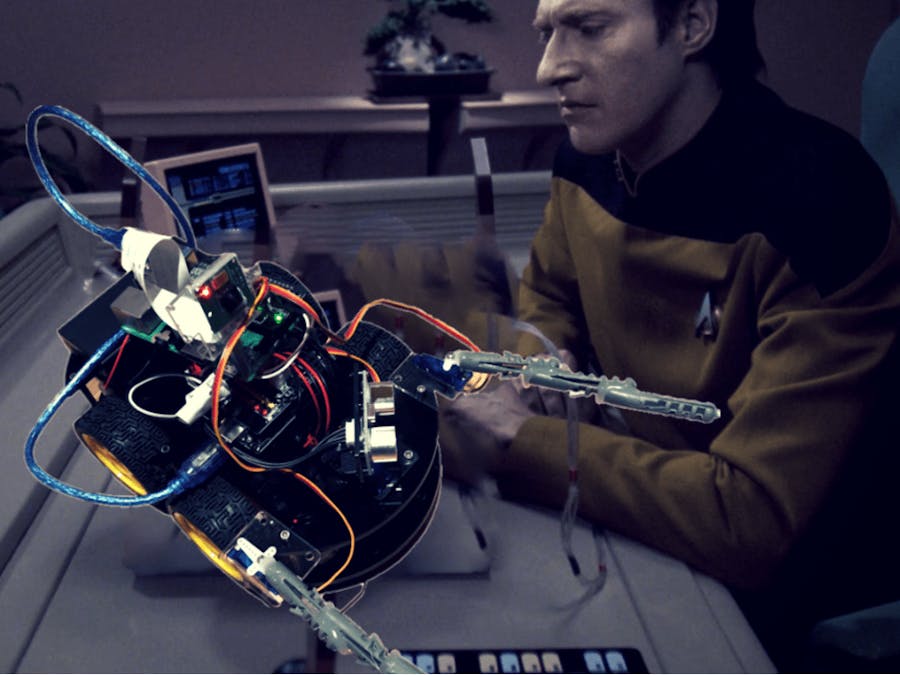
概述:使用tactigon one和t-skin来移动机械臂,让它像影子一样跟随我们的移动。通过使用两个触感器(一个在手臂上,另一个在前臂上)和t型皮肤(戴在手上),我们使这成为可能!我们使用的其他设备有覆盆子pi 3、arduino uno、ble和伺服防护罩,显然还有机械臂。
图片

概述:矩阵语音alexa机器人是一个四轮机器人,可以通过矩阵alexa进行控制。
图片

概述:一种小型自主漫游车,旨在帮助容易私奔的孩子保持安全。
图片
概述:一个用树脂驱动的凸机器人。io远程指挥。这是一个概念的证明,展示了一个被树脂激活的云脑机器人。
图片
概述:机器人跟踪特定颜色范围内的圆圈,并避开沿途的障碍物。
图片
概述:一款elegoo机器人车载套件v3,带有一些额外的树莓派技术和tensorflow图像识别功能。
图片
概述:我们将使用一个l293d电机驱动器和两个直流电机构建一个简单的线跟踪机器人。
图片

概述:最可爱的遥控机器人宠物!
图片

图片
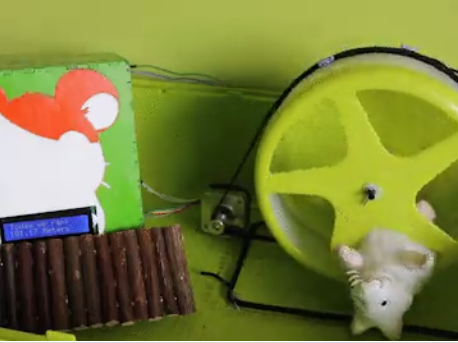
概述:一只互联网控制和跟踪的僵尸仓鼠!
评论
0 / 100
查看更多
2019-08-09
1131

Copyright © 2024 苏州硬禾信息科技有限公司 All Rights Reserved 苏ICP备19040198号